- Fläche (Mathematik)
-

Dieser Artikel wurde auf der Qualitätssicherungsseite des Portals Mathematik eingetragen. Dies geschieht, um die Qualität der Artikel aus dem Themengebiet Mathematik auf ein akzeptables Niveau zu bringen. Bitte hilf mit, die Mängel dieses Artikels zu beseitigen, und beteilige dich bitte an der Diskussion!
 Sphäre
Sphäre
Eine Fläche im anschaulichen Sinn ist eine zweidimensionale Teilmenge des dreidimensionalen Raumes, beispielsweise eine Ebene, eine zweidimensionale geometrische Figur oder die Begrenzungsfläche eines dreidimensionalen Körpers. Eine Fläche kann somit sowohl flach als auch gekrümmt sein.
Ein Maß für die Größe einer Fläche ist der Flächeninhalt. Umgangssprachlich wird der Flächeninhalt oftmals ebenfalls als „Fläche“ bezeichnet. Dieser Artikel soll jedoch das mathematische Objekt „Fläche“ behandeln, nicht den Flächeninhalt.
Je nach Teilgebiet der Mathematik unterscheiden sich die genauen Definitionen einer Fläche. Gemeinsam haben alle Definitionen, dass die Fläche ein zweidimensionales Objekt ist.
Inhaltsverzeichnis
Elementargeometrie
In der Elementargeometrie betrachtet man beispielsweise die Ebene, Vielecke oder das Innere eines Kreises und nennt solche Objekte Flächen. Objekte wie der Zylinder und der Kegel werden ebenfalls in der Elementargeometrie betrachtet. Diese im dreidimensionalen Raum existierenden Körper werden durch Flächen begrenzt. In der Elementargeometrie wird der Begriff der Fläche erklärt, jedoch nicht in mathematischer Strenge definiert.
Flächen im Raum
Durch Gleichungen beschriebene Flächen
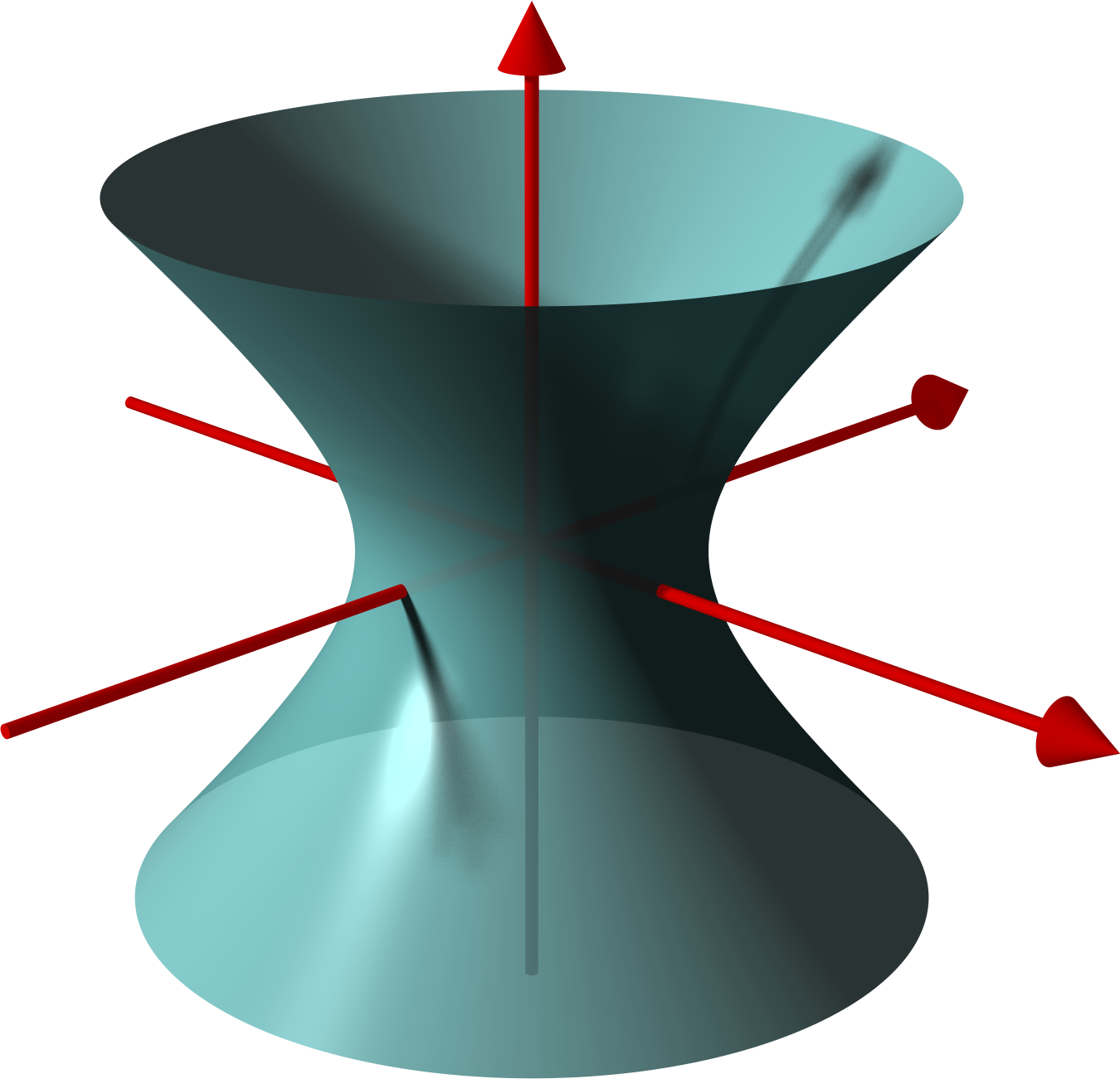
 Einschaliges Hyperboloid
Einschaliges HyperboloidViele Flächen lassen sich durch Gleichungen beschreiben: Die Sphäre (Kugelfläche) mit Mittelpunkt (0,0,0) und Radius r durch x2 + y2 + z2 = r2 oder das einschalige Hyperboloid durch x2 + y2 − z2 = 1. Man kann jede solche Gleichung auf die Form f(x,y,z) = 0 mit einer Funktion f bringen. Nicht jede solche Gleichung beschreibt eine Fläche, z.B. besteht die Lösungsmenge von x2 + y2 + z2 = 0 aus dem einzelnen Punkt (0,0,0).
Sei
 eine glatte Funktion mit der Eigenschaft, dass für jede Lösung (x0,y0,z0) der Gleichung f(x,y,z) = 0 der Gradient
eine glatte Funktion mit der Eigenschaft, dass für jede Lösung (x0,y0,z0) der Gleichung f(x,y,z) = 0 der Gradientnicht null ist. Dann nennt man 0 einen regulären Wert von f, und die Menge
 eine reguläre Fläche. In der allgemeinen Definition einer regulären Fläche S müssen zu jedem Punkt
eine reguläre Fläche. In der allgemeinen Definition einer regulären Fläche S müssen zu jedem Punkt  eine Umgebung
eine Umgebung  und eine differenzierbare Funktion
und eine differenzierbare Funktion  existieren, so dass 0 ein regulärer Wert von f ist und
existieren, so dass 0 ein regulärer Wert von f ist und  gilt.
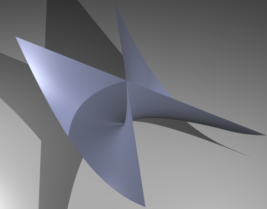
gilt. Whitney-Regenschirm
Whitney-RegenschirmEine Fläche heißt reelle algebraische Fläche, wenn sie sich durch eine Polynomfunktion
![f\in\R[x,y,z]](2/532987b4a9d1669399bb5995614e2b37.png) beschreiben lässt. Der genaue Flächenbegriff der reellen algebraischen Geometrie entspricht nicht immer der elementaren Vorstellung: Ein Beispiel ist der Whitney-Regenschirm x2 − y2z = 0, der neben der im Bild sichtbaren Fläche noch die z-Achse als Stiel beinhaltet, aber diese beiden Teile lassen sich algebraisch nicht voneinander trennen.
beschreiben lässt. Der genaue Flächenbegriff der reellen algebraischen Geometrie entspricht nicht immer der elementaren Vorstellung: Ein Beispiel ist der Whitney-Regenschirm x2 − y2z = 0, der neben der im Bild sichtbaren Fläche noch die z-Achse als Stiel beinhaltet, aber diese beiden Teile lassen sich algebraisch nicht voneinander trennen. Zylinder
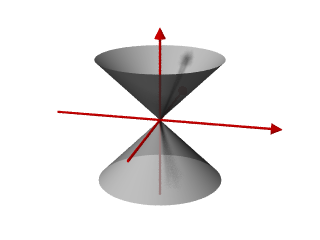
Zylinder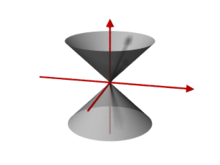 Doppelkegel
DoppelkegelFlächen zweiter Ordnung sind algebraische Flächen, die durch ein Polynom vom Grad 2 gegeben sind. Beispiele sind der Zylinder, der auch in der Elementargeometrie untersucht wird und als mögliche Gleichung x2 + y2 = 1 hat, oder der Doppelkegel mit Gleichung x2 + y2 − z2 = 0. Der Doppelkegel ist keine reguläre Fläche, er hat im Nullpunkt eine Singularität.
Durch Parametrisierungen beschriebene Flächen
Eine Parametrisierung eines Flächenstücks ist eine auf einem Teil
 der Ebene definierte, glatte Immersion
der Ebene definierte, glatte Immersion  . (Eine Abbildung heißt Immersion, wenn die Ableitung von ϕ in jedem Punkt von U injektiv ist.) Im einfachsten Fall kann ϕ der Graph
. (Eine Abbildung heißt Immersion, wenn die Ableitung von ϕ in jedem Punkt von U injektiv ist.) Im einfachsten Fall kann ϕ der Graph  einer Funktion
einer Funktion  sein. Erlaubt man noch einen Rollenwechsel bei x,y,z, dann genügen Funktionsgraphen zur lokalen Beschreibung beliebiger Flächenstücke.
sein. Erlaubt man noch einen Rollenwechsel bei x,y,z, dann genügen Funktionsgraphen zur lokalen Beschreibung beliebiger Flächenstücke.Eine reguläre Fläche ist in diesem Kontext eine Teilmenge
 , so dass zu jedem Punkt
, so dass zu jedem Punkt  eine Umgebung und eine Parametrisierung
eine Umgebung und eine Parametrisierung  existiert, so dass ϕ einen Homöomorphismus
existiert, so dass ϕ einen Homöomorphismus  induziert. Diese Beschreibung ist zu der weiter oben gegebenen äquivalent.
induziert. Diese Beschreibung ist zu der weiter oben gegebenen äquivalent.Unter einer immersierten Fläche versteht man allerdings nicht die offensichtliche Abschwächung der vorstehenden Definition, sondern eine abstrakte Fläche S (s.u.) zusammen mit einer Immersion
 .
.Eine Regelfläche ist eine Fläche, die für ein Intervall
 eine Parametrisierung der Form
eine Parametrisierung der Formmit Funktionen
 besitzt. An jeden Stützpunkt p(u) ist also eine v-Gerade mit Richtung r(u) angeheftet. (Der Begriff „Regelfläche“ entstand aus einer Falschübersetzung des englischen Begriffs „ruled surface“: So bedeutet „rule“ nicht nur „Regel“, sondern auch „linieren“.) Falls
besitzt. An jeden Stützpunkt p(u) ist also eine v-Gerade mit Richtung r(u) angeheftet. (Der Begriff „Regelfläche“ entstand aus einer Falschübersetzung des englischen Begriffs „ruled surface“: So bedeutet „rule“ nicht nur „Regel“, sondern auch „linieren“.) Falls  für alle u und p'(u) nicht im Erzeugnis von r(u) und r'(u) liegt, handelt es sich um eine immersierte Fläche. Der Flächenanteil des Whitney-Regenschirms ist eine mit Ausnahme der Spitze immersierte Regelfläche, das einschalige Hyperboloid eine reguläre Regelfläche.
für alle u und p'(u) nicht im Erzeugnis von r(u) und r'(u) liegt, handelt es sich um eine immersierte Fläche. Der Flächenanteil des Whitney-Regenschirms ist eine mit Ausnahme der Spitze immersierte Regelfläche, das einschalige Hyperboloid eine reguläre Regelfläche.Eine Rotationsfläche ist eine Fläche, die durch die Rotationsbewegung eines Funktionsgraphen um eine Koordinatenachse erzeugt wird. Ist
 eine glatte Funktion, dann erhält man durch Rotation von
eine glatte Funktion, dann erhält man durch Rotation von  um die x-Achse die Fläche
um die x-Achse die FlächeWenn f(u) > 0 für alle u, erhält man eine reguläre Fläche. Hat f Nullstellen, handelt es sich nicht um eine immersierte Fläche.
Differentialgeometrie von regulären Flächen
Tangentialebene und Normalenvektor
Sei S eine reguläre Fläche und x ein Punkt auf S. Ist S lokal bei x durch eine reguläre Parametrisierung
mit  und ϕ(x0) = x gegeben, dann ist das Bild der Ableitung
und ϕ(x0) = x gegeben, dann ist das Bild der Ableitung  ein zweidimensionaler Unterraum TxS, den man die Tangentialebene von S in x nennt. Die anschauliche Tangentialebene erhält man, indem man den Unterraum um den Vektor x verschiebt. Ein Normalenvektor ist ein Vektor, der orthogonal zur Tangentialebene ist.
ein zweidimensionaler Unterraum TxS, den man die Tangentialebene von S in x nennt. Die anschauliche Tangentialebene erhält man, indem man den Unterraum um den Vektor x verschiebt. Ein Normalenvektor ist ein Vektor, der orthogonal zur Tangentialebene ist.In der Beschreibung durch lokale Gleichungen sei
eine offene Teilmenge und eine Funktion mit regulärem Wert 0, so dass  gilt. Dann ist der Gradient von f in allen Punkten von
gilt. Dann ist der Gradient von f in allen Punkten von  jeweils ein Normalenvektor, und man kann die Tangentialebene als diejenige Ebene verstehen, die senkrecht auf dem Gradienten steht.
jeweils ein Normalenvektor, und man kann die Tangentialebene als diejenige Ebene verstehen, die senkrecht auf dem Gradienten steht.Krümmung
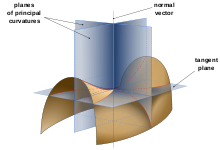 Fläche mit Normalenvektor und Hauptkrümmungsebenen
Fläche mit Normalenvektor und HauptkrümmungsebenenSei S eine reguläre Fläche, x ein Punkt auf S und nx ein Normalenvektor der Länge 1 im Punkt x. Für einen variablen Tangentialvektor v der Länge 1 im Punkt x spannen nx und v eine (orientierte) Ebene Ex,v auf, und der Schnitt
 ist lokal eine reguläre Kurve. Sei κx(v) die Krümmung dieser Kurve, d.h. wenn c die nach Bogenlänge parametrisierte Kurve mit c(0) = x ist, dann ist
ist lokal eine reguläre Kurve. Sei κx(v) die Krümmung dieser Kurve, d.h. wenn c die nach Bogenlänge parametrisierte Kurve mit c(0) = x ist, dann ist  . Die Zahl κx(v) heißt Krümmung von S in Richtung v. Hat κx(v) nicht für alle v denselben Wert, dann gibt es zwei zueinander orthogonale Richtungen, in denen κx das Maximum κ1 bzw. das Minimum κ2 annimmt. κ1 und κ2 heißen die Hauptkrümmungen von S im Punkt x, die zugehörigen Richtungen Hauptkrümmungsrichtungen. Aus ihnen definiert man die gaußsche Krümmung
. Die Zahl κx(v) heißt Krümmung von S in Richtung v. Hat κx(v) nicht für alle v denselben Wert, dann gibt es zwei zueinander orthogonale Richtungen, in denen κx das Maximum κ1 bzw. das Minimum κ2 annimmt. κ1 und κ2 heißen die Hauptkrümmungen von S im Punkt x, die zugehörigen Richtungen Hauptkrümmungsrichtungen. Aus ihnen definiert man die gaußsche Krümmung  und die mittlere Krümmung
und die mittlere Krümmung  . Wechselt man die Richtung des Normalenvektors, ändern die Hauptkrümmungen ihr Vorzeichen, so dass die gaußsche Krümmung gleich bleibt und die mittlere Krümmung ebenfalls das Vorzeichen wechselt. Die Sphäre mit Radius R hat Gaußkrümmung 1 / R2 und mittlere Krümmung 1 / R (für nach außen zeigende Normalenvektoren).
. Wechselt man die Richtung des Normalenvektors, ändern die Hauptkrümmungen ihr Vorzeichen, so dass die gaußsche Krümmung gleich bleibt und die mittlere Krümmung ebenfalls das Vorzeichen wechselt. Die Sphäre mit Radius R hat Gaußkrümmung 1 / R2 und mittlere Krümmung 1 / R (für nach außen zeigende Normalenvektoren).Setzt man κx durch die Festlegung
 für alle
für alle  zu einer auf der ganzen Tangentialebene definierten Funktion
zu einer auf der ganzen Tangentialebene definierten Funktion  fort, erhält man eine quadratische Form. Die zugehörige Bilinearform heißt zweite Fundamentalform IIx und lässt sich auch als
fort, erhält man eine quadratische Form. Die zugehörige Bilinearform heißt zweite Fundamentalform IIx und lässt sich auch als  mit der Weingartenabbildung
mit der Weingartenabbildung  schreiben, die wiederum die Ableitung des Normalenvektors, aufgefasst als Gauß-Abbildung
schreiben, die wiederum die Ableitung des Normalenvektors, aufgefasst als Gauß-Abbildung  , ist. Die Hauptkrümmungen und Hauptkrümmungsrichtungen sind die Eigenwerte und Eigenvektoren der Weingartenabbildung, der Zusammenhang zur ersten Beschreibung wird durch den Trägheitssatz von Sylvester hergestellt.
, ist. Die Hauptkrümmungen und Hauptkrümmungsrichtungen sind die Eigenwerte und Eigenvektoren der Weingartenabbildung, der Zusammenhang zur ersten Beschreibung wird durch den Trägheitssatz von Sylvester hergestellt.Abwickelbare Flächen sind eine Klasse von Flächen, deren gaußsche Krümmung überall den Wert 0 hat. Wenn eine Fläche gaußsche Krümmung 0 hat und keine planaren Punkte besitzt, d.h. keine Punkte, in denen beide Hauptkrümmungen 0 sind, dann ist sie abwickelbar. Flächen mit gaußscher Krümmung 0 sind lokal isometrisch zur Ebene, d.h. sie lassen sich ohne innere Formverzerrung auf die Ebene abbilden. Beispiele sind Zylinder und Kegel, bei denen die Abbildung in die Ebene durch das Abwickeln des Mantels gegeben ist.[1]
Flächeninhalt und Minimalflächen

Mit Hilfe der gramschen Determinante kann man den Flächeninhalt eines Flächenstücks definieren und allgemeiner eine Integrationstheorie für Flächen entwickeln: Ist
ein Flächenstück der Fläche S und  eine Funktion, dann ist das Integral von f definiert als
eine Funktion, dann ist das Integral von f definiert alsFür Integrale über ganz S muss man die Fläche evtl. unterteilen.
Eine Minimalfläche ist eine Fläche, die lokal minimalen Flächeninhalt hat, genauer deren Parametrisierung ein kritischer Punkt für das Flächeninhaltsfunktional ist. Derartige Formen nehmen beispielsweise Seifenhäute an, wenn sie über einen entsprechenden Rahmen (wie etwa einem Blasring) gespannt sind. Minimalflächen sind auch dadurch charakterisiert, dass ihre mittlere Krümmung überall den Wert 0 hat.
Die gaußsche Krümmung ist ein Maß für die Abweichung des lokalen Flächeninhalts von den Werten der Ebene: Bezeichnet A(r) den Flächeninhalt der Scheibe mit Radius r um einen Punkt, dann ist die gaußsche Krümmung in diesem Punkt:
Orientierbarkeit
 Möbiusband
MöbiusbandDer Begriff der Orientierbarkeit fasst die Situation, dass die zwei Seiten einer Fläche global miteinander vertauscht sein können. Das Paradebeispiel dafür ist das Möbiusband. Für eine reguläre Fläche kann man die zwei Seiten dadurch beschreiben, dass es in jedem Punkt zwei Normalenvektoren (d.h. senkrecht auf der Fläche stehend) der Länge 1 gibt, zu jeder Seite hin einen. Kann man nun einheitlich (d.h. glatt) für jeden Punkt eine der beiden Richtungen auswählen, nennt man die Fläche orientierbar. (Es gibt andere Charakterisierungen von Orientierbarkeit, die keinen Gebrauch vom umgebenden Raum oder der Differenzierbarkeit machen, s.u.) Ist S die Nullstellenmenge der Funktion
mit regulärem Wert 0, dann istin jedem Punkt von S ein Normalenvektor der Länge 1, also ist eine solche Fläche orientierbar. Ebenso ist jede kompakte reguläre Fläche orientierbar (nicht jedoch jede kompakte abstrakte Fläche, wie z.B. die projektive Ebene oder die kleinsche Flasche).
Abstrakte Flächen
Motivation
Sei
eine offene Teilmenge und eine reguläre Parametrisierung eines Flächenstücks S = ϕ(U). Man kann sich nun fragen, welche Daten man auf U vorgeben muss, um Aussagen über S zu treffen. Nach Definition ist für  die Ableitung dϕ(u) ein Isomorphismus
die Ableitung dϕ(u) ein Isomorphismus  . Die Länge von Tangentialvektoren kann man also in eine Bilinearform
. Die Länge von Tangentialvektoren kann man also in eine Bilinearformübersetzen, die hier erste Fundamentalform, im allgemeinen Kontext aber riemannsche Metrik genannt wird. Die gramsche Determinante für ϕ ist gleich der Determinante der Darstellungsmatrix von g, also enthält die riemannsche Metrik bereits die Information über Flächeninhalte und Integrale auf S. Die zweite Fundamentalform und damit die Hauptkrümmungen kann man jedoch nicht alleine an g ablesen, wie das folgende Beispiel eines Zylinderstücks zeigt:
Für jedes
ist gu das Standard-Skalarprodukt, also kann die riemannsche Metrik nicht zwischen einem Zylinder und einer Ebene unterscheiden. Aber: Das Theorema egregium von Carl Friedrich Gauß besagt, dass die gaußsche Krümmung nur von der riemannschen Metrik abhängt.Damit lässt sich der gaußsche Krümmungsbegriff auf Flächen übertragen, für die keine Einbettung in den euklidischen Raum bekannt ist oder auch nur existiert. Ein Beispiel ist die hyperbolische Ebene, die über eine naheliegende riemannsche Metrik verfügt, mit der sie konstante negative Krümmung hat, aber nach einem Satz von David Hilbert keine isometrische Einbettung in den euklidischen Raum besitzt.[2] (Isometrisch bedeutet hier, dass die Einbettung die vorgegebene Metrik induziert.)
Ein anderes Phänomen sind Flächen wie die reelle projektive Ebene, die überhaupt keine Einbettung in den euklidischen Raum erlauben, sondern lediglich Immersionen (z.B. als Boysche Fläche). Man kann sie zwar in höherdimensionale Räume einbetten, aber da man letztlich in Eigenschaften interessiert ist, die unabhängig von der Einbettung sind, ist es vorteilhaft, eine Sprache zu entwickeln, in der keine Einbettungen mehr vorkommen.
Definitionen
In mathematischen Teilgebieten wie der Topologie, der Differentialtopologie, der riemannschen Geometrie oder der Funktionentheorie betrachtet man Flächen nicht mehr als Objekte, die in den dreidimensionalen Raum eingebettet sind, vielmehr verzichtet man auf den umgebenden Raum und betrachtet nur die Fläche für sich. Man spricht von abstrakten Flächen.
Im Bereich der Topologie ist eine Fläche ein besonderer topologischer Raum. Genauer handelt es sich um eine zweidimensionale topologische Mannigfaltigkeit. Das heißt die Fläche in der Topologie ist ein Hausdorff-Raum, der lokal homöomorph zu
 ist. Die lokalen Homöomorphismen werden Karten genannt, ihre Gesamtheit bildet einen Atlas. Da die Fläche lokal homöomorph zum zweidimensionalen Raum ist, definiert man, dass die Dimension der Fläche gerade zwei ist. Beispielsweise ist die offene Kreisscheibe eine Fläche in Sinn der Topologie. Diese ist allerdings sogar global homöomorph zu . Die Flächen in der Topologie sind das Grundgerüst für die spezielleren Flächen, die in den anderen erwänhten, mathematischen Teilgebieten untersucht werden. Die im vorigen Abschnitt angesprochenen algebraischen Flächen sind allerdings zwar topologische Räume aber im Allgemeinen keine Flächen im Sinne der Topologie.
ist. Die lokalen Homöomorphismen werden Karten genannt, ihre Gesamtheit bildet einen Atlas. Da die Fläche lokal homöomorph zum zweidimensionalen Raum ist, definiert man, dass die Dimension der Fläche gerade zwei ist. Beispielsweise ist die offene Kreisscheibe eine Fläche in Sinn der Topologie. Diese ist allerdings sogar global homöomorph zu . Die Flächen in der Topologie sind das Grundgerüst für die spezielleren Flächen, die in den anderen erwänhten, mathematischen Teilgebieten untersucht werden. Die im vorigen Abschnitt angesprochenen algebraischen Flächen sind allerdings zwar topologische Räume aber im Allgemeinen keine Flächen im Sinne der Topologie.Im Bereich der Differentialtopologie stattet man die topologische Fläche noch zusätzlich mit einer differenzierbaren Struktur aus, um Funktionen, die auf der Fläche definiert sind, differenzieren und um die Tangentialebene definieren zu können. Da die Fläche ja ohne umgebenden Raum definiert wurde, kann im Gegensatz zum vorigen Abschnitt die Orientierbarkeit der Fläche nicht mit Hilfe eines Normalenvektors definiert werden. Aus diesem Grund wird eine (äquivalente) Definition mittels Karten und Tangentialebene gewählt. Die Eigenschaft der Orientierbarkeit einer Fläche hängt also nicht vom umgebenden Raum ab.
In der Funktionentheorie ergänzt man die Fläche nicht um eine differenzierbare Struktur, sondern um eine komplexe Struktur. Solche Flächen werden riemannsche Flächen genannt, und die komplexe Struktur ermöglicht es auf ihnen den Begriff der holomorphen Funktion zu definieren. Im Bereich der riemannschen Flächen gibt zwei unterschiedliche Dimensionsbegriffe. Zum einen ist sie wieder ein Spezialfall der topologichen Fläche und hat damit die Dimension zwei, zum anderen betrachtet man in der Funktionentheorie meistens die komplexe Zahlenebene
 und versteht die riemannschen Flächen als eine Verallgemeinerung dieser. In diesem Kontext hat die riemannsche Fläche die (komplexe) Dimension eins und wird daher auch als „komplexe Kurve“ interpretiert. Kompakte riemannsche Flächen sind projektive algebraische Kurven, d.h. sie lassen sich in einen komplexen projektiven Raum einbetten, so dass das Bild durch Polynomgleichungen beschrieben wird.
und versteht die riemannschen Flächen als eine Verallgemeinerung dieser. In diesem Kontext hat die riemannsche Fläche die (komplexe) Dimension eins und wird daher auch als „komplexe Kurve“ interpretiert. Kompakte riemannsche Flächen sind projektive algebraische Kurven, d.h. sie lassen sich in einen komplexen projektiven Raum einbetten, so dass das Bild durch Polynomgleichungen beschrieben wird.Auf einer differenzierbaren Fläche kann auch eine riemannsche Metrik gegeben sein, das ist ein Skalarprodukt auf jeder Tangentialebene, das differenzierbar vom Basispunkt abhängt. Jede reguläre Fläche im
 erhält über die Einschränkung des Standardskalarprodukts eine riemannsche Metrik. Eine riemannsche Metrik induziert auf orientierbaren Flächen eine konforme Struktur, in der die Längenmessung verlorengeht, aber die Information über Winkel erhaltenbleibt. Die 90°-Drehung auf den Tangentialräumen ist eine fastkomplexe Struktur, und im Fall von Flächen ist jede fastkomplexe Struktur eine komplexe Struktur, d.h. jede Fläche mit einer riemannschen Metrik ist auf kanonische Weise eine riemannsche Fläche.
erhält über die Einschränkung des Standardskalarprodukts eine riemannsche Metrik. Eine riemannsche Metrik induziert auf orientierbaren Flächen eine konforme Struktur, in der die Längenmessung verlorengeht, aber die Information über Winkel erhaltenbleibt. Die 90°-Drehung auf den Tangentialräumen ist eine fastkomplexe Struktur, und im Fall von Flächen ist jede fastkomplexe Struktur eine komplexe Struktur, d.h. jede Fläche mit einer riemannschen Metrik ist auf kanonische Weise eine riemannsche Fläche.Klassifikation
 Orientierbare geschlossene Fläche vom Geschlecht 3
Orientierbare geschlossene Fläche vom Geschlecht 3Eine kompakte Fläche wird auch geschlossen genannt, wenn man betonen will, dass es nicht um den allgemeineren Begriff von kompakten Flächen mit Rand geht.
Der Klassifikationssatz gibt eine Liste von Flächen an, so dass jede geschlossene Fläche zu genau einer von ihnen homöomorph ist.
- Eine orientierbare Fläche ist homöomorph zur verbundenen Summe von
 Tori. Für g = 0 handelt es sich um die Sphäre, für g = 1 um den Torus. Die Zahl g ist das Geschlecht der Fläche.
Tori. Für g = 0 handelt es sich um die Sphäre, für g = 1 um den Torus. Die Zahl g ist das Geschlecht der Fläche. - Eine nicht orientierbare Fläche ist homöomorph zu einer verbundenen Summe von projektiven Ebenen.
Für geschlossene differenzierbare Flächen ergibt sich dieselbe Klassifikation: jede Fläche ist diffeomorph zu genau einer der Flächen aus der Liste.
Für riemannsche Flächen überträgt sich die Klassifikation nicht: Jede riemannsche Fläche ist orientierbar und eine orientierbare geschlossene Fläche kann wesentlich verschiedene komplexe Strukturen tragen.
- Für Geschlecht 0 gibt es nur eine riemannsche Fläche, die projektive Gerade oder riemannsche Zahlenkugel.
- Für Geschlecht 1 sind die riemannschen Flächen (bis auf die Wahl eines Basispunkts) elliptische Kurven und durch ihre j-Invariante klassifiziert.
- Für Geschlecht g > 1 werden die riemannschen Flächen durch den Teichmüller-Raum parametrisiert, der selbst eine (3g − 3)-dimensionale komplexe Mannigfaltigkeit ist.
Der Uniformisierungssatz besagt, dass es für die (nicht notwendigerweise kompakte) universelle Überlagerung einer riemannschen Fläche nur drei Möglichkeiten gibt (entsprechend der Unterscheidung g = 0,g = 1,g > 1):
- die riemannsche Zahlenkugel
- die komplexe Zahlenebene
- die obere Halbebene
Geschlossene Flächen mit riemannscher Metrik sind für eine Klassifikation zu kompliziert. Einfach zusammenhängende Flächen mit konstanter Krümmung, die nicht notwendigerweise kompakt, aber vollständig sind, sind jedoch klassifizierbar: Durch Skalierung kann man sich auf die Krümmungen + 1,0, − 1 beschränken. Dann gibt jeweils bis auf Isometrie jeweils nur eine derartige Fläche:
- + 1: die Einheitssphäre
- 0: die euklidische Ebene
- − 1: die hyperbolische Ebene
Diese Aussage gilt analog für beliebige Dimensionen. Nach einem Satz von Jacques Hadamard ist auch jede einfach zusammenhängende vollständige Fläche nicht notwendigerweise konstanter, aber überall nichtpositiver Krümmung diffeomorph zur Ebene.
Verallgemeinerungen
- Nimmt man in der Definition topologischer oder differenzierbarer Flächen noch die Halbebene
 als Modell hinzu, erhält man den Begriff der Fläche mit Rand. Beispiele: Die abgeschlossene Einheitskreisscheibe in der Ebene ist eine differenzierbare Fläche mit Rand, das abgeschlossene Einheitsquadrat ist eine topologische Fläche mit Rand.
als Modell hinzu, erhält man den Begriff der Fläche mit Rand. Beispiele: Die abgeschlossene Einheitskreisscheibe in der Ebene ist eine differenzierbare Fläche mit Rand, das abgeschlossene Einheitsquadrat ist eine topologische Fläche mit Rand. - Teilmengen von
 , die ähnliche Differenzierbarkeitseigenschaften wie reguläre Flächen haben, nennt man Untermannigfaltigkeiten. Untermannigfaltigkeiten der Dimension n − 1 nennt man Hyperflächen.
, die ähnliche Differenzierbarkeitseigenschaften wie reguläre Flächen haben, nennt man Untermannigfaltigkeiten. Untermannigfaltigkeiten der Dimension n − 1 nennt man Hyperflächen. - Höherdimensionale Analoga der abstrakten Flächen sind topologische Mannigfaltigkeiten und differenzierbare Mannigfaltigkeiten.
- Höherdimensionale Analoga der riemannschen Flächen sind komplexe Mannigfaltigkeiten. Komplexe Mannigfaltigkeiten der Dimension 2 nennt man komplexe Flächen. Sie sind vierdimensionale reelle Mannigfaltigkeiten.
Literatur
Flächen im Raum:
- Ethan D. Bloch, A First Course in Geometric Topology and Differential Geometry, Birkhäuser Boston 1997
- Wilhelm Klingenberg, A Course in Differential Geometry, Springer New York 1978
Abstrakte Flächen mit riemannscher Metrik:
- Manfredo Perdigão do Carmo, Riemannian Geometry, Birkhäuser, Boston 1992, ISBN 0-8176-3490-8
Riemannsche Flächen:
- Hershel M. Farkas, Irwin Kra, Riemann Surfaces, Springer New York 1980
Klassifikation topologischer Flächen:
- William S. Massey, Algebraic Topology: An Introduction, Springer, Berlin 1967, ISBN 3540902716
Klassifikation differenzierbarer Flächen:
- Morris W. Hirsch, Differential Topology, Springer, New York 1976, ISBN 0-387-90148-5
Weblinks
 Commons: Fläche – Sammlung von Bildern, Videos und Audiodateien
Commons: Fläche – Sammlung von Bildern, Videos und AudiodateienEinzelnachweise















Wikimedia Foundation.