- Kreiselstabilisierung
-
Physikalische Größe Name Trägheitsmoment Formelzeichen der Größe I, J, Θ Größen- und
Einheiten-
systemEinheit Dimension SI kg·m2 M·L2 Siehe auch: Trägheitstensor Das Trägheitsmoment, engl. Moment of Inertia (MOI), auch Massenträgheitsmoment oder Inertialmoment, ist eine Größe in der Mechanik. Sie gibt die Trägheit eines starren Körpers gegenüber einer Änderung seiner Rotationsbewegung an.
Man verwendet das Trägheitsmoment bei Formeln zur Beschreibung von Drehbewegungen. Im Vergleich zu den Formeln für geradlinige Bewegungen übernimmt es in diesen die Rolle der Masse. Beispielsweise lautet die Bewegungsgleichung für Drehbewegungen
 mit dem Drehmoment D (die Kraft multipliziert mit der Entfernung von der Drehachse), dem Trägheitsmoment J und der Winkelgeschwindigkeit ω (Zahl der Umdrehungen pro Sekunde multipliziert mit 2π). Diese Gleichung hat damit die gleiche Form wie die Newtonsche Gleichung
mit dem Drehmoment D (die Kraft multipliziert mit der Entfernung von der Drehachse), dem Trägheitsmoment J und der Winkelgeschwindigkeit ω (Zahl der Umdrehungen pro Sekunde multipliziert mit 2π). Diese Gleichung hat damit die gleiche Form wie die Newtonsche Gleichung  . Deswegen ist in der älteren Literatur auch die Bezeichnung Drehmasse für das Trägheitsmoment gebräuchlich.
. Deswegen ist in der älteren Literatur auch die Bezeichnung Drehmasse für das Trägheitsmoment gebräuchlich.Das Trägheitsmoment eines Körpers hängt von seiner Form, der Massenverteilung und zusätzlich noch von der Drehachse ab. Zur vollständigen Beschreibung des Trägheitsverhaltens eines starren Körpers reicht deshalb eine einzelne Zahl nicht aus; man verwendet dafür den Trägheitstensor. Das Trägheitsmoment für jede beliebige Achse kann dann aus dem Trägheitstensor berechnet werden. Wird ein Koordinatensystem gewählt, in dem die Drehachse mit einer der Koordinatenachsen zusammenfällt, so ist das Trägheitsmoment mit dem zugehörigen Diagonalelement des Trägheitstensors identisch.
Inhaltsverzeichnis
Bedeutung
Anschaulich ist ein Vergleich zwischen einer geradlinigen Translationsbewegung (also der Bewegung entlang einer Geraden) und einer Drehbewegung:
- Werden ein Fahrrad und ein Eisenbahnwagen auf dieselbe Geschwindigkeit beschleunigt, so ist intuitiv klar, dass für dieselbe Beschleunigung der Eisenbahnwagen kräftiger angeschoben werden muss als das Fahrrad. Die erforderliche Kraft hängt von der zu beschleunigenden trägen Masse ab.
- Bei Rotationsbewegungen liegt die Sache anders. Werden zwei Kugeln gleicher Masse aber unterschiedlichen Durchmessers – etwa aus Holz und aus Blei – zum Rotieren gebracht, wird ihre Massenverteilung um die Drehachse relevant. Je weiter die Massen von der Drehachse entfernt sind, desto größer ist das benötigte Drehmoment um beide Kugeln in eine Drehung mit gleicher Frequenz zu versetzen. Der Grund dafür ist, dass ein weiter vom Mittelpunkt entferntes Teilchen für eine volle Umdrehung einen weiteren Weg zurücklegen muss als ein weiter innen liegendes Teilchen. Seine Geschwindigkeit muss also, um die gleiche Zahl von Umdrehungen pro Sekunde zu erreichen und damit die gleiche Winkelgeschwindigkeit zu besitzen, höher sein als die Geschwindigkeit eines weiter innen liegenden Teilchens. Betrachtet man einen Körper als Verbindung aus vielen kleinen Teilchen, lässt sich diese Beobachtung übertragen: Für die, bei gleicher Masse natürlich größere, Holzkugel ist das größere Drehmoment nötig. Der Widerstand, den die Kugeln der Winkelgeschwindigkeitsänderung entgegensetzen, wird durch das Trägheitsmoment beschrieben.
Beispiele: Drehstuhl, Pirouette
Mit einem einfachen Experiment kann man eine Änderung des Trägheitsmoments bei gleich bleibendem Drehimpuls veranschaulichen. Man setzt sich (möglichst zentrisch) auf einen Drehstuhl (ein üblicher Schreibtischsessel erfüllt denselben Zweck) und versetzt sich in Drehung, Arme und Beine ausgestreckt. Wenn man dann die Arme und Beine an den Körper heranzieht, nimmt das Trägheitsmoment ab – mit der Folge, dass die Drehbewegung schneller wird, weil der Drehimpuls erhalten werden muss (abgesehen von Reibungseinflüssen; siehe Drehimpulserhaltung). Erneutes Ausstrecken verlangsamt die Bewegung wieder. Um den Effekt zu verstärken, kann man in jede Hand schwere Gegenstände nehmen, etwa Hanteln. Je größer deren Masse, desto deutlicher wird der Effekt.
Ein ähnliches Beispiel ist der Pirouetteneffekt, der aus dem Eiskunstlaufen bekannt ist. Die Kontrolle der Drehgeschwindigkeit kann allein aus der Verlagerung der Körpermasse aus der Drehachse erfolgen. Zieht der Eiskunstläufer die Arme an oder richtet sich aus einer Hockerstellung gerade auf, so dreht er sich schneller – ein erneutes Schwung holen ist nicht nötig.
Formelzeichen, Einheit und Geschichte
Die geläufigsten Formelzeichen für das Trägheitsmoment sind J und I, zurückgehend auf das lateinische Wort iners, das untätig und träge bedeutet. Da beide Symbole aber auch in der Elektrotechnik Verwendung finden, ist weiterhin ein Θ (großes Theta) gebräuchlich. In diesem Artikel wird durchgehend J verwendet.
Die SI-Einheit des Trägheitsmoments ist [kg m2].
Das Trägheitsmoment wurde erstmals 1730 von Leonhard Euler in seinem Buch "Theoria motus corporum solidorum seu rigidorum" verwendet.
Berechnung
Massenverteilung
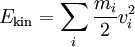
Bezogen auf einen Körper lautet dessen gesamte kinetische Energie:
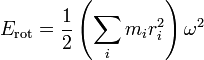
Durch die Darstellung der Bahngeschwindigkeit über die Winkelgeschwindigkeit erhält man die kinetische Energie der Rotation:
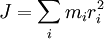
Somit berechnet sich das Trägheitsmoment einzelner Massenpunkte mit der Summe:
mit mi für die Masse und ri für den senkrechten Abstand des i-ten Teilchens von der Drehachse. Ist die Drehachse die x-Achse, so lautet das zugehörige Trägheitsmoment
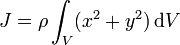
und nach dem Übergang zum Integral mit dem Volumen V des aus den Massenpunkten zusammengesetzten Körpers:
 ist die vom Ortsvektor abhängige Dichte.
ist die vom Ortsvektor abhängige Dichte.Bei einer homogenen Masseverteilung ist die Dichte konstant und die Rechnung vereinfacht sich zu:
 Weiter unten ist eine Beispielrechnung angegeben.
Weiter unten ist eine Beispielrechnung angegeben.Das Trägheitsmoment rotationssymmetrischer Körper, die um ihre Symmetrieachse (z-Achse) rotieren, kann einfach mit Hilfe von Zylinderkoordinaten berechnet werden. Dazu muss entweder die Höhe als Funktion des Radius (h = h(r)) oder der Radius als Funktion der z-Koordinate (r = r(z)) bekannt sein. Das Volumenelement in Zylinderkoordinaten ergibt sich zu
 . Die Integrationen über
. Die Integrationen über  und z bzw. über und r sind leicht auszuführen und man erhält:
und z bzw. über und r sind leicht auszuführen und man erhält: bzw.
bzw. 
Trägheitsmoment bezüglich zueinander paralleler Achsen
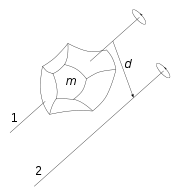 Illustration der Steiner-Regel. Drehachse 1 geht durch den Schwerpunkt des Körpers der Masse m. Drehachse 2 ist um den Abstand d verschoben.
Illustration der Steiner-Regel. Drehachse 1 geht durch den Schwerpunkt des Körpers der Masse m. Drehachse 2 ist um den Abstand d verschoben.Ist das Trägheitsmoment JS für eine Achse durch den Schwerpunkt eines Körpers bekannt, so kann mit Hilfe des steinerschen Satzes das Trägheitsmoment JP für eine beliebige parallel verschobene Drehachse berechnet werden. Die Formel lautet:
Dabei gibt d den Abstand der Achse durch den Schwerpunkt zur parallel verschobenen Drehachse an.
Man kann die Steiner-Regel für zwei beliebige parallele Drehachsen verallgemeinern. Dazu muss die Steiner-Regel zweimal hintereinander angewendet werden: Zunächst verschiebe man die Drehachse so, dass sie durch den Schwerpunkt des Körpers geht, danach auf den gewünschten Zielort.
Trägheitstensor
Der Trägheitstensor Ixy eines Körpers ist eine Verallgemeinerung des Trägheitsmomentes. In einem kartesischen Koordinatensystem lässt sich der Trägheitstensor als Matrix darstellen, die sich aus den Trägheitsmomenten bezüglich der drei Koordinatenachsen und den Deviationsmomenten zusammensetzt. Die drei Trägheitsmomente bilden die Diagonale der Matrix, die Deviationsmomente sind die Nebendiagonalelemente. Mit Hilfe des Trägheitstensor lässt sich z. B. das Trägheitsmoment bezüglich einer beliebigen, durch den Schwerpunkt gehenden Achse berechnen. Wenn ein starrer Körper um eine solche Achse mit der Winkelgeschwindigkeit
 rotiert, so ergibt sich das Trägheitsmoment zu
rotiert, so ergibt sich das Trägheitsmoment zuoder in Matrixschreibweise
Drehung des Koordinatensystems
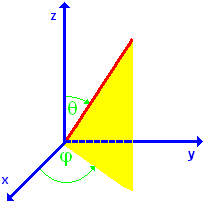
Eine Achse in beliebiger Raumrichtung wird beschrieben durch den Einheitsvektor
 . Man kann diesen z. B. dadurch erhalten, dass man den Einheitsvektor in z-Richtung mittels einer Drehmatrix R dreht:
. Man kann diesen z. B. dadurch erhalten, dass man den Einheitsvektor in z-Richtung mittels einer Drehmatrix R dreht: 
Mit
 erhält man
erhält man 
Mit Hilfe dieser Drehmatrix kann nun der Trägheitstensor in ein Koordinatensystem transformiert werden, in dem die z-Achse in Richtung der Rotationsachse zeigt:

Das Trägheitsmoment für die neue z-Achse ist jetzt einfach das 3. Diagonalelement des Tensors in der neuen Darstellung. Nach Ausführung der Matrizenmultiplikation und trigonometrischen Umformungen ergibt sich

Beispielrechnung: Rotationssymmetrischer Körper
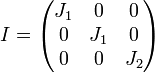
Wir betrachten als Beispiel dazu den Trägheitstensor eines rotationssymmetrischen Körpers. Wenn eine der Koordinatenachsen (hier die z-Achse) mit der Symmetrieachse zusammenfällt, dann ist dieser Tensor diagonal. Die Trägheitsmomente für Rotation um die x-Achse und die y-Achse sind gleich (Ixx = Iyy = J1). Für die z-Achse kann das Trägheitsmoment verschieden sein (Izz = J2). Der Trägheitstensor hat damit folgende Gestalt:
Transformiert man diesen Tensor wie oben beschrieben in ein Koordinatensystem, das um den Winkel
 um die y-Achse gedreht ist, so erhält man:
um die y-Achse gedreht ist, so erhält man:
Daraus ergibt sich:
- Für
 sind die Trägheitsmomente für die x- und z-Achse von abhängig.
sind die Trägheitsmomente für die x- und z-Achse von abhängig. - Für ist der Trägheitstensor nicht mehr diagonal, es treten Deviationsmomente auf.
- Das Trägheitsmoment für die neue z-Achse ist:

- Für J1 = J2 hängt wegen
 das Trägheitsmoment nicht von der Richtung der Drehachse ab
das Trägheitsmoment nicht von der Richtung der Drehachse ab
Besondere Trägheitsmomente
Hauptträgheitsmoment
Betrachtet man einen unregelmäßig geformten Körper, der um eine Achse durch seinen Schwerpunkt rotiert, so variiert dessen Trägheitsmoment je nach Lage der Drehachse. Dabei gibt es zwei Achsen, bezüglich derer das Trägheitsmoment des Körpers maximal bzw. minimal ist. Diese Achsen stehen immer senkrecht zueinander und bilden zusammen mit einer dritten, wiederum senkrecht auf beiden stehenden Achse die Hauptträgheitsachsen des Körpers. In einem von den Hauptträgheitsachsen aufgespannten Koordinatensystem ist der Trägheitstensor diagonal. Die zu den Hauptträgheitsachsen gehörenden Trägheitsmomente sind also die Eigenwerte des Trägheitstensors, sie heißen Hauptträgheitsmomente.
Die Hauptträgheitsachsen fallen mit eventuell vorhandenen Symmetrieachsen des Körpers zusammen. Sind zwei Hauptträgheitsmomente gleich groß, so sind alle Drehachsen in der Ebene, die von den zugehörigen Hauptträgheitsachsen aufgespannt wird, ebenfalls Hauptträgheitsachsen mit dem gleichen Trägheitsmoment. Das ist bei zylindersymmetrischen Körpern unmittelbar klar, gilt aber z. B. ebenso für einen Stab mit quadratischer oder hexagonaler Grundfläche. Für den Fall, dass alle Hauptträgheitsmomente identisch sind, ist, wie oben gezeigt wurde, jede Drehachse durch den Schwerpunkt eine Hauptträgheitsachse mit dem gleichen Trägheitsmoment. Für alle regelmäßigen Körper wie Kugel, Tetraeder, Würfel, usw. ist demnach das Trägheitsmoment für jede Achse durch den Schwerpunkt gleich groß.
Siehe auch: Trägheitsellipsoid
Trägheitsmoment zur eingespannten Achse
Wenn ein starrer Körper um eine fest eingespannte Achse mit der Winkelgeschwindigkeit
 rotiert (die Richtung des Vektors ist die Richtung der Drehachse), so lässt sich der Drehimpuls
rotiert (die Richtung des Vektors ist die Richtung der Drehachse), so lässt sich der Drehimpuls  aus
aus  berechnen. Dabei ist I der Trägheitstensor. Im Allgemeinen hat der Drehimpuls jetzt nicht die Richtung der Drehachse und ist zeitlich nicht konstant, so dass die Lager ständig Drehmomente aufbringen müssen (Dynamische Unwucht). Nur bei Rotation um eine der Hauptträgheitsachsen ist
berechnen. Dabei ist I der Trägheitstensor. Im Allgemeinen hat der Drehimpuls jetzt nicht die Richtung der Drehachse und ist zeitlich nicht konstant, so dass die Lager ständig Drehmomente aufbringen müssen (Dynamische Unwucht). Nur bei Rotation um eine der Hauptträgheitsachsen ist  .
.Für die Drehimpulskomponente L entlang der Drehachse gilt L = Jω, dabei ist ω die Winkelgeschwindigkeit und J das Trägheitsmoment bezüglich der Drehachse
. Die kinetische Energie der Rotation, auch kurz als Rotationsenergie bezeichnet, kann durchausgedrückt werden. Diese Formeln zeigen die Analogie zu den entsprechenden Formeln für Impuls und kinetische Energie der Translationsbewegung.
Beispiele
Trägheitsmomente von Himmelskörpern
Fast alle größeren Körper im Weltall (Sterne, Planeten) sind angenähert kugelförmig und rotieren mehr oder weniger schnell. Das Trägheitsmoment um die Rotationsachse ist immer das größte des Himmelskörpers.
Die Differenz dieses „polaren“ und des äquatorialen Trägheitmoments hängt mit der Abplattung des Körpers zusammen, also seiner Verformung der reinen Kugelgestalt durch die Fliehkraft der Rotation. Bei der Erde liegt diese Differenz bei 0,3 Prozent, entspricht also fast der Erdabplattung von 1:298,24. Beim rasch rotierenden Jupiter sind diese Relativwerte rund 20-mal größer.
Das Trägheitsmoment eines Himmelskörpers lässt wegen r² im obigen Integral auf die innere Konzentration seiner Masse schließen. Jenes der Erde ist kleiner, als wenn sie homogen aufgebaut wäre, nämlich etwa 0,33 m r2, statt 0,4 m r2.[1] Daraus kann man errechnen, dass der Erdkern aus Eisen (oder metallisch verdichtetem Wasserstoff) besteht.
Hauptträgheitsmomente einfacher geometrischer Körper
Wenn nicht ausdrücklich anders angegeben, liegt der Schwerpunkt der geometrischen Körper auf der Drehachse auf die sich das Trägheitsmoment bezieht. m ist die Masse des rotierenden Körpers. Das Trägheitsmoment für Drehungen um andere Achsen kann man dann mit Hilfe des Satzes von Steiner berechnen.
Abbildung Beschreibung Trägheitsmoment 
Eine Punktmasse im Abstand r um eine Drehachse. 
Ein Zylindermantel, der um seine Symmetrieachse rotiert, für eine Wandstärke  .
.
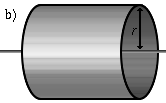
Ein Vollzylinder, der um seine Symmetrieachse rotiert. 
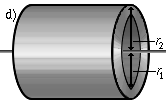
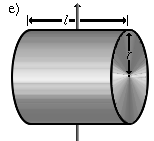
Ein Hohlzylinder, der um seine Körperachse rotiert. Schließt die vorgenannten Grenzfälle Zylindermantel und Vollzylinder mit ein. 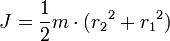
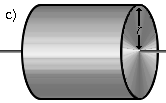
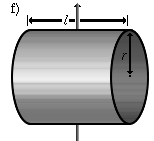
Ein Vollzylinder, der um eine Achse rotiert, die senkrecht zur Symmetrieachse steht, und durch seinen Schwerpunkt geht. 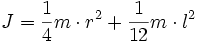
Ein Zylindermantel der senkrecht zu seiner Körperachse rotiert. 

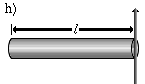
Ein dünner Stab, der senkrecht zur Symmetrieachse rotiert. Diese Formel ist eine Näherung für einen Zylinder mit  .
.
Dünner Stab, der senkrecht zu seiner Körperachse um ein Ende rotiert. Diese Formel ist die Anwendung der Steiner-Regel auf den dünnen Stab. 
Eine Kugelschale, die um den Mittelpunkt rotiert, für eine Wandstärke .

Eine massive Kugel, die um den Mittelpunkt rotiert. 
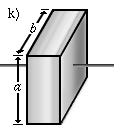
Ein Quader, der um eine Achse rotiert, die durch seinen Schwerpunkt verläuft und parallel zu einer seiner Kanten liegt. 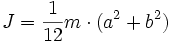
Ein Quader, der um eine Achse rotiert, die durch den Mittelpunkt einer Randfläche unter einem Winkel α bezüglich der Achse senkrecht durch diese Fläche geht. Die Fläche ac ist dabei immer parallel zur Rotationsachse! 
_svg.png)
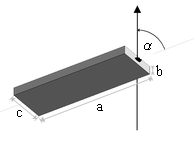
Ein massiver Kegel, der um seine Achse rotiert. 

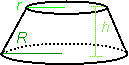
Ein massiver Kegelstumpf, der um seine Achse rotiert. 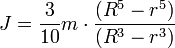
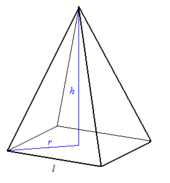
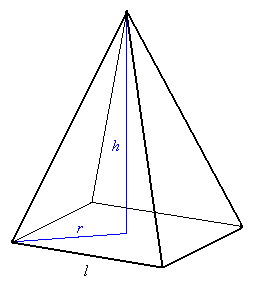
Eine vierseitige, regelmäßige Pyramide, die um ihre Symmetrieachse rotiert. 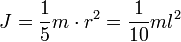
Beispielrechnung: Trägheitsmoment der homogenen Vollkugel
- Zum Verständnis dieses Abschnittes sind grundlegende Kenntnisse der Integralrechnung und Koordinatentransformation hilfreich.
Um das Trägheitsmoment einer massiven homogenen Kugel bezüglich einer Drehachse durch den Kugelmittelpunkt zu berechnen, wird das im Abschnitt „Berechnung“ angegebene Integral verwendet. Der Einfachheit halber soll der Kugelmittelpunkt im Ursprung eines kartesischen Koordinatensystems liegen und die Drehachse entlang der z-Achse verlaufen. Um das Integral
auszuwerten, empfiehlt es sich statt kartesischen lieber Kugelkoordinaten zu verwenden. Beim Übergang müssen dabei die kartesischen Koordinaten x, y, z und das Volumenelement dV durch die Kugelkoordinaten
 ausgedrückt werden. Das geschieht mithilfe der Ersetzungsregeln
ausgedrückt werden. Das geschieht mithilfe der Ersetzungsregelnund der Funktionaldeterminanten
Einsetzen in den Ausdruck für das Trägheitsmoment liefert
Hier zeigt sich der Vorteil der Kugelkoordinaten: Die Integralgrenzen hängen nicht voneinander ab. Die beiden Integrationen über r und
lassen sich daher elementar ausführen. Das verbleibende Integral inkann durch partielle Integration mit
gelöst werden:
Für das Trägheitsmoment ergibt sich schließlich:
Experimentelle Bestimmung
Zur Messung eines Trägheitsmoments eines Körpers verwendet man einen Drehtisch. Dieser besteht aus einer Kreisscheibe, die um ihre Symmetrieachse drehbar ist und einer Schneckenfeder. Sie bewirkt bei einer Drehung der Scheibe ein rücktreibendes Drehmoment D, das direkt proportional zum Auslenkwinkel φ ist: D = − Drφ. Die Proportionalitätskonstante Dr nennt man Direktionsmoment oder Richtmoment. Ihr Wert hängt von der Stärke der Feder ab. Die Scheibe führt nun harmonische Schwingungen mit der Schwingungsdauer
 ,
,
aus, wobei J0 das Trägheitsmoment der Scheibe ist. Legt man nun zusätzlich einen Körper mit bekanntem Trägheitsmoment J1 auf die Scheibe, so ändert sich die Schwingungsdauer zu
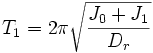 .
.
Aus der Differenz
lässt sich das Direktionsmoment Dr des Drehtisches bestimmen und aus obiger Formel für T0 erhält man dann das Trägheitsmoment J0 des Drehtisches. Legt man nun einen beliebigen Körper auf den Drehtisch, so kann man sein Trägheitsmoment J bezüglich der Rotationsachse aus der gemessenen Schwingungsdauer
berechnen.
Siehe auch
Literatur
- Paul A. Tipler: Physik. 3. korrigierter Nachdruck der 1. Auflage 1994, Spektrum Akademischer Verlag Heidelberg Berlin, 2000, ISBN 3-86025-122-8
- Ernst W. Otten: Repetitorium Experimentalphysik. Springer-Verlag Berlin Heidelberg, 1998, ISBN 3-540-62987-4
- Torsten Fließbach: Mechanik. 3. Auflage, Spektrum Akademischer Verlag, Heidelberg 1999, ISBN 3-8274-0546-7
- Herbert Goldstein, Charles Poole, John Safko: Classical mechanics. International Edition, 3. Auflage, Pearson/Addison Wesley, Upper Saddle River, N.J., 2002, ISBN 0-321-18897-7
Einzelnachweise
- ↑ NASA Earth Fact Sheet
Weblinks
- Trägheitsmomente geometrischer Körper bei Matheplanet – Anleitungen zum Berechnen diverser Trägheitsmomente mit Beispielen.
- Interaktives Java-Applet mit 3D-Visualisierung – Näherung der Trägheitsmomente frei definierbarer Körper mit diversen Beispielen.



.svg)








Wikimedia Foundation.