- Kosinus
-
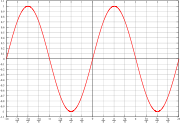
 Graphen der Sinus- und der Cosinusfunktion
Graphen der Sinus- und der CosinusfunktionDie Sinusfunktion und die Kosinusfunktion (auch Cosinusfunktion) sind elementare mathematische Funktionen aus der Klasse der trigonometrischen Funktionen.
Sinus und Kosinus sind grundlegend in allen mathematischen Disziplinen. In der Geometrie für Dreiecksberechnungen in der ebenen und sphärischen Trigonometrie ebenso wie in der Analysis.
Wellen wie Schallwellen, Wasserwellen, elektromagnetische Wellen lassen sich aus Sinus- und Kosinuswellen zusammengesetzt beschreiben, so dass die Funktionen in der Physik allgegenwärtig sind.Das Sinnesorgan Ohr zerlegt den eintreffenden Schall in seine Sinuskomponenten und führt damit eine Fourieranalyse durch: je nachdem, wie viel einer solchen Komponente in dem Gesamtsignal – dem eintreffenden Schall – vorhanden ist, wird ein Ton entsprechender Lautstärke und Frequenz wahrgenommen.
Herkunft des Namens
Die lateinische Bezeichnung „Sinus“ 'Bogen, Krümmung, Busen' für diesen mathematischen Begriff wählte Gerhard von Cremona 1175 [1] als Übersetzung der arabischen Bezeichnung „gaib oder jiba“ (جيب) „Tasche, Kleiderfalte“, selbst entlehnt von Sanskrit „jiva“ ‘Bogensehne‘ indischer Mathematiker (vielleicht nach dem Verlauf einer Sehne, die schraubenförmig um einen Stab gewickelt wird).
Die Bezeichnung „Cosinus“ ergibt sich aus complementi sinus, also Sinus des Komplementärwinkels. Diese Bezeichnung wurde zuerst in den umfangreichen trigonometrischen Tabellen verwendet, die von Georg von Peuerbach und seinem Schüler Regiomontanus erstellt wurden [2].
Geometrische Definition
Definition am rechtwinkligen Dreieck
 Dreieck mit einem rechten Winkel in C
Dreieck mit einem rechten Winkel in CAlle ebenen, rechtwinkligen Dreiecke, die im Maß der beiden spitzen Winkel übereinstimmen, haben die gleichen Längenverhältnisse der Seiten.
Diese Besonderheit kann ausgenutzt werden, um Berechnungen am rechtwinkligen Dreieck durchzuführen. Kennt man nämlich die Längenverhältnisse im rechtwinkligen Dreieck, kann man Maße von Winkeln und Längen von Seiten berechnen. Deshalb gibt man den Längenverhältnissen im rechtwinkligen Dreieck besondere Namen.
Die Längenverhältnisse der drei Seiten im rechtwinkligen Dreieck sind nur abhängig vom Maß der beiden spitzen Winkel. Da das Maß eines dieser Winkel das Maß des anderen Winkels festlegt (Die Winkelsumme der beiden spitzen Winkel beträgt stets 90°) hängen die Längenverhältnisse im rechtwinkligen Dreieck nur vom Maß eines der beiden spitzen Winkel ab.
Deshalb definiert man die Längenverhältnisse in Abhängigkeit eines der beiden spitzen Winkel:
Der Sinus eines Winkels ist das Verhältnis der Länge der Gegenkathete (Kathete, die dem Winkel gegenüberliegt) zur Länge der Hypotenuse (Seite gegenüber dem rechten Winkel).
Der Kosinus ist das Verhältnis der Länge der Ankathete (das ist jene Kathete, die einen Schenkel des Winkels bildet) zur Länge der Hypotenuse.
Bei den für Dreiecke üblichen Bezeichnungen der Größen (Hypotenuse c) gilt hier:
 und
und 
Da aus geometrischen Gründen die Hypotenuse die längste Seite ist (denn sie liegt dem größten Winkel, also dem rechten Winkel, gegenüber), gelten auch stets
 und
und  .
.Betrachtet man statt α den gegenüberliegenden Winkel β, so wechseln beide Katheten ihre Rolle, die Ankathete von α ist die Gegenkathete von β und die Gegenkathete von α ist die Ankathete von β, es gilt also
und
Da im rechtwinkeligen Dreieck
 gilt, folgt
gilt, folgtund
 .
.
Auf dieser Beziehung beruht auch die Bezeichnung Kosinus, nämlich der Sinus des Komplementärwinkels.
Aus dem Satz des Pythagoras folgt die Beziehung (Trigonometrischer Pythagoras)
 .
.
Im rechtwinkligen Dreieck lassen sich Sinus und Kosinus nur für Winkel zwischen 0 und 90 Grad definieren. Für beliebige Winkel ist der Sinus als y-Koordinate und der Kosinus als x-Koordinate eines Punktes am Einheitskreis (s.u.) definiert.
Definition mit Einheitskreis
 Trigonometrische Funktionen am Einheitskreis im ersten Quadranten
Trigonometrische Funktionen am Einheitskreis im ersten QuadrantenDa im rechtwinkeligen Dreieck der Winkel zwischen Hypotenuse und Kathete Werte von 0 bis 90 Grad annehmen kann, sind Sinus und Kosinus zunächst nur für solche Winkel definiert. Für eine allgemeine Definition betrachtet man einen Punkt P mit den Koordinaten (x,y) auf dem Einheitskreis, also x2 + y2 = 1. Der Ortsvektor von P schließt mit der x-Achse einen Winkel α ein. Der Koordinatenursprung (0,0), der Punkt (x,0) auf der x-Achse und der Punkt P(x,y) bilden ein rechtwinkliges Dreieck. Die Länge der Hypotenuse beträgt
 . Die Ankathete des Winkels α ist die Strecke zwischen (0,0) und (x,0) und hat die Länge x, es gilt also
. Die Ankathete des Winkels α ist die Strecke zwischen (0,0) und (x,0) und hat die Länge x, es gilt alsoDie Gegenkathete des Winkels α ist die Strecke zwischen (x,0) und(x,y), und hat die Länge y, es gilt also
Die y-Koordinate eines Punktes im ersten Quadranten des Einheitskreises entspricht also dem Sinus des Winkels zwischen seinem Ortsvektor und der x-Achse, die x-Koordinate dem Kosinus des Winkels. Setzt man diese Definition in den anderen Quadranten fort, so lassen sich Sinus und Kosinus für beliebige Winkel definieren.
 Definition allgemein
Definition allgemeinFür negative Winkel betrachte man die Beziehung
und
 ,
,
aus der sich Sinus und Kosinus für den vierten Quadranten, also Winkel zwischen −90 und 0 Grad berechnen lassen. Der Sinus ist also eine ungerade Funktion, der Kosinus eine gerade.
Für Winkel größer 90 Grad betrachte man die Beziehung
und
 ,
,
aus der sich Sinus und Kosinus für den zweiten und dritten Quadranten, also Winkel zwischen 90 und 270 Grad berechnen lassen.
Für Winkel kleiner als -90 Grad und größer als 270 Grad ergeben sich Sinus und Kosinus aus den Beziehungen
und
 ;
;
Sinus und Kosinus sind also periodische Funktionen mit Periode 360 Grad.
Durch den Strahlensatz folgt aus der Definition für Sinus und Kosinus, dass
 die Strecke rechts in der Zeichnung ist.
die Strecke rechts in der Zeichnung ist.Aus der Zeichnung ergibt sich offensichtlich die Abschätzung sinα < α für 0 < α < π / 2. Die andere Abschätzung α < tanα ist nicht offensichtlich und muss bewiesen werden: offenbar ist die Fläche A des Kreisbogensegmentes kleiner als das große Dreieck:
 . Zusammen ergibt sich sinα < α < tanα, also
. Zusammen ergibt sich sinα < α < tanα, also  . Hieraus ergibt sich nach dem Sandwichlemma der wichtige Grenzwert
. Hieraus ergibt sich nach dem Sandwichlemma der wichtige Grenzwert  .
.Analytische Definition
 Graph der Sinusfunktion x→sinx
Graph der Sinusfunktion x→sinx Graph der Kosinusfunktion x→cosx
Graph der Kosinusfunktion x→cosxObige Definitionen des Sinus und des Kosinus beinhalten geometrische Überlegungen. Geometrie wird häufig naiv-intuitiv und nicht auf axiomatischer Basis behandelt. Sinus und Kosinus spielen aber auch eine wichtige Rolle in der Analysis, in der ein viel formalerer Zugang zweckmäßig ist. Daher sind die geometrischen Definitionen für die Analysis nicht ausreichend, und es wird eine analytische Definition benötigt. Auf Basis einer streng formalisierten Geometrie lässt sich zwar die Äquivalenz der geometrischen und der analytischen Definition zeigen; auf Basis einer naiven Geometrie sind die geometrischen Überlegungen allerdings lediglich als Heuristik zur Begründung der analytischen Definition zu betrachten.
Die analytische Definition erlaubt zusätzlich die Erweiterung auf komplexe Argumente. Sinus und Kosinus als komplexwertige Funktion aufgefasst sind holomorph und surjektiv.
Für die analytische Definition gibt es in der Literatur keinen einheitlichen Zugang; es sind mehrere äquivalente Varianten verbreitet. In jeder dieser Varianten ist der Winkel im Bogenmaß; bei Angabe des Winkels in Grad würden störende Faktoren dazukommen.
Definition als Taylorreihe
Mit Hilfe der aus geometrischen Überlegungen berechneten Ableitung des Sinus gilt für die 4n + k-te Ableitung an der Stelle 0
Daraus ergibt sich folgende Taylorreihenentwicklung um x = 0:
Für die aus geometrischen Überlegungen berechneten Ableitung des Kosinus gilt für die 4n + k-te Ableitung an der Stelle 0
Daraus ergibt sich folgende Taylorreihenentwicklung um x = 0:
Mit dem Quotientenkriterium lässt sich zeigen, dass diese Potenzreihen für jede komplexe Zahl x absolut und in jeder beschränkten Teilmenge der komplexen Zahlen gleichmäßig konvergieren. Diese unendlichen Reihen verallgemeinern also die Definition des Sinus und des Kosinus von reellen auf komplexe Argumente. In der Analysis werden die Sinusfunktion und die Kosinusfunktion häufig mittels dieser Reihenentwicklung definiert. Auch π wird dort üblicherweise nicht geometrisch, sondern beispielsweise über diese Reihe und die Beziehung
 als das Doppelte der kleinsten positiven Nullstelle der Kosinusfunktion definiert.
als das Doppelte der kleinsten positiven Nullstelle der Kosinusfunktion definiert.Für kleine Werte zeigen diese Reihen ein sehr gutes Konvergenzverhalten. Zur numerischen Berechnung kann man daher die Periodizität und Symmetrie der Funktionen ausnutzen und den x-Wert bis auf den Bereich − π / 4 bis π / 4 reduzieren (siehe Reduktionsformel). Danach sind für eine geforderte Genauigkeit nur noch wenige Glieder der Reihe zu berechnen. Das Taylorpolynom der Kosinusfunktion bis zur vierten Potenz z. B. hat im Intervall [ − π / 4,π / 4] einen relativen Fehler von unter 0,05 %. Im Artikel Taylor-Formel sind einige dieser so genannten Taylorpolynome grafisch dargestellt und eine Näherungsformel mit Genauigkeitsangabe angegeben. Zu beachten ist allerdings, dass die Teilsummen der Taylorpolynome nicht die bestmögliche numerische Approximation darstellen; beispielsweise in Abramowitz-Stegun finden sich Näherungspolynome mit noch kleinerem Approximationsfehler.[3]
Beziehung zur Exponentialfunktion
 komplexe Sinusfunktion
komplexe Sinusfunktion komplexe Kosinusfunktion
komplexe KosinusfunktionDie trigonometrischen Funktionen sind eng verbunden mit der Exponentialfunktion. Dieser Ansatz führt zum einen Sinus und Kosinus auf nur eine Reihe zurück, und ist aus der Eulerformel
 .
.
motiviert:
Dabei wurde verwendet
 sowie
sowie 
Für eine reelle Zahl
 ist also
ist also  der Realteil und
der Realteil und  der Imaginärteil der komplexen Zahl
der Imaginärteil der komplexen Zahl  .
.Für beliebige komplexe Zahlen z definiert man analog
und
Man kann aber auch den Sinus wie oben als Taylorreihe definieren und dann die Übereinstimmung mit dieser Definition zeigen.
Ausgehend von dieser Definition lassen sich sehr leicht die Eigenschaften des Sinus und die Additionstheoreme des Sinus und Kosinus nachweisen.
Definition über analytische Berechnung der Bogenlänge
Die Definition des Sinus und Kosinus als Taylorreihe liefert keinen analytischen Beweis der Differenzierbarkeit des Sinus und Kosinus, sondern setzt die Differenzierbarkeit letztlich axiomatisch voraus. Die Definition mit Hilfe der Exponentialfunktion hat dasselbe Problem, versteckt es allerdings im Beweis der Eulerformel.
Ein echter analytischer Beweis der Differenzierbarkeit des Sinus und Kosinus erfordert, dass die geometrische Definition des Sinus und Kosinus zuerst analytisch formalisiert wird. Dies ist möglich, indem man den Einheitskreis
 beispielsweise als
beispielsweise alsparametrisiert. Die Länge dieser Kurve wird auch als Bogenlänge bezeichnet und berechnet sich als
Wie leicht zu zeigen ist, ist
 ungerade, stetig, streng monoton wachsend und beschränkt. Da die gesamte Bogenlänge dem Kreisumfang entspricht, folgt, dass das Supremum von gleich
ungerade, stetig, streng monoton wachsend und beschränkt. Da die gesamte Bogenlänge dem Kreisumfang entspricht, folgt, dass das Supremum von gleich  ist; wird bei dieser Vorgangsweise also analytisch als Supremum von definiert.
ist; wird bei dieser Vorgangsweise also analytisch als Supremum von definiert.Die Funktion
ist auch differenzierbar:
 .
.
Weil sie stetig und streng monoton wachsend ist, ist sie auch invertierbar, und für die Umkehrfunktion
gilt
 .
.
Mit Hilfe dieser Umkehrfunktion
 lassen sich nun Sinus und Kosinus als
lassen sich nun Sinus und Kosinus als  - und
- und  -Komponente von
-Komponente von  analytisch definieren:
analytisch definieren:sowie
 .
.
Bei dieser Definition des Sinus und Kosinus über die analytische Berechnung der Bogenlänge werden die geometrischen Begriffe tatsächlich sauber formalisiert. Sie hat allerdings den Nachteil, dass im didaktischen Aufbau der Analysis der Begriff der Bogenlänge erst sehr spät formal eingeführt wird und daher Sinus und Kosinus erst relativ spät verwendet werden können.
Definition als Lösung einer Funktionalgleichung
Eine anderer analytischer Zugang ist, Sinus und Kosinus als Lösung einer Funktionalgleichung zu definieren, die im Wesentlichen aus den Additionstheoremen besteht: Gesucht ist ein Paar stetiger Funktionen
 , das für alle
, das für alle  die Gleichungen
die Gleichungen und
und
erfüllt. Die Lösung
 definiert dann den Sinus, die Lösung
definiert dann den Sinus, die Lösung  den Kosinus. Um Eindeutigkeit zu erreichen, sind einige Zusatzbedingungen zu erfüllen. In Heuser, Lehrbuch der Analysis, Teil 1 wird zusätzlich gefordert, dass
den Kosinus. Um Eindeutigkeit zu erreichen, sind einige Zusatzbedingungen zu erfüllen. In Heuser, Lehrbuch der Analysis, Teil 1 wird zusätzlich gefordert, dassgilt. Bei diesem Zugang wird offensichtlich die Differenzierbarkeit des Sinus vorausgesetzt;
wird in weiterer Folge analytisch als das doppelte der kleinsten positiven Nullstelle des Kosinus definiert. Verwendet man den Zugang von Leopold Vietoris[4] und berechnet die Ableitung des Sinus aus den Additionstheoremen, so ist es zweckmäßiger, auf geeignete Weise analytisch (beispielsweise als Hälfte des Grenzwerts des Umfangs des dem Einheitskreis eingeschriebenen  -Ecks) zu definieren und dann die Differenzierbarkeit der Lösung dieser Funktionalgleichung zu beweisen. Als Zusatzbedingung zu den Additionstheoremen fordert man dann beispielsweise
-Ecks) zu definieren und dann die Differenzierbarkeit der Lösung dieser Funktionalgleichung zu beweisen. Als Zusatzbedingung zu den Additionstheoremen fordert man dann beispielsweise ,
, , und
, und für alle
für alle  .
.
Unter den gewählten Voraussetzungen ist die Eindeutigkeit der Lösung der Funktionalgleichung relativ einfach zu zeigen; die geometrisch definierten Funktionen Sinus und Kosinus lösen auch offensichtlich die Funktionalgleichung. Die Existenz einer Lösung lässt sich analytisch beispielsweise nachweisen, indem man zeigt, dass die Taylorreihen von Sinus und Kosinus oder eine andere der oben verwendeten analytischen Darstellungen von Sinus und Kosinus die Funktionalgleichung tatsächlich lösen.
Produktentwicklung

 ist dabei im Bogenmaß anzugeben.
ist dabei im Bogenmaß anzugeben.Wertebereich und spezielle Funktionswerte
Zusammenhang zwischen Sinus und Kosinus
Insbesondere folgt daraus
 und
und  . Diese Ungleichung gilt aber nur für reelle Argumente α; für die über die Potenzreihe definierten komplexen Argumente können Sinus und Kosinus beliebige Werte annehmen.
. Diese Ungleichung gilt aber nur für reelle Argumente α; für die über die Potenzreihe definierten komplexen Argumente können Sinus und Kosinus beliebige Werte annehmen.Verlauf des Sinus in den vier Quadranten
In den vier Quadranten ist der Verlauf der Sinusfunktion folgendermaßen:
Quadrant Gradmaß Bogenmaß Bildmenge Monotonie Konvexität Punkttyp 
0 0 Nullstelle, Wendepunkt 1. Quadrant 
0 < x < π / 2 positiv: 0 < sinx < 1 steigend konkav 
π / 2 1 Maximum 2. Quadrant 
π / 2 < x < π positiv: 0 < sinx < 1 fallend konkav 
π 0 Nullstelle, Wendepunkt 3. Quadrant 
π < x < 3π / 2 negativ: − 1 < sinx < 0 fallend konvex 
3π / 2 − 1 Minimum 4. Quadrant 
3π / 2 < x < 2π negativ: − 1 < sinx < 0 steigend konvex Für Argumente außerhalb dieses Bereiches erhält man den Wert des Sinus daraus, dass der Sinus periodisch mit der Periode 360° (bzw. 2π rad) ist, d. h.
 . Außerdem gilt
. Außerdem gilt  .
.Verlauf des Kosinus in den vier Quadranten
Der Kosinus ist ein um 90° (bzw. π/2 rad) phasenverschobener Sinus, es gilt
 .
.In den vier Quadranten ist der Verlauf der Kosinusfunktion daher folgendermaßen:
Quadrant Gradmaß Bogenmaß Bildmenge Monotonie Konvexität Punkttyp 0 1 Maximum 1. Quadrant 0 < x < π / 2 positiv: 0 < cosx < 1 fallend konkav π / 2 0 Nullstelle, Wendepunkt 2. Quadrant π / 2 < x < π negativ: − 1 < cosx < 0 fallend konvex π − 1 Minimum 3. Quadrant π < x < 3π / 2 negativ: − 1 < cosx < 0 steigend konvex 3π / 2 0 Nullstelle, Wendepunkt 4. Quadrant 3π / 2 < x < 2π positiv: 0 < cosx < 1 steigend konkav Für Argumente außerhalb dieses Bereiches erhält man den Wert des Kosinus daraus, dass der Kosinus so wie der Sinus periodisch mit der Periode 360° (bzw. 2π rad) ist, d. h.
 . Außerdem gilt
. Außerdem gilt  .
.Wichtige Funktionswerte
Winkel α (Grad) 


Bogenmaß 0π 



π 
Sinus 





Kosinus Tangens 

Polstelle Polstelle Weitere mit Quadratwurzeln angebbare Funktionswerte
Über die Berechnung der fünften Einheitswurzeln mittels einer quadratischen Gleichung erhält man

Mit Hilfe der Additionstheoreme kann man viele weitere solche Ausdrücke berechnen:
 angewendet bei der Berechnung der Kantenlänge des regulären Fünfecks
angewendet bei der Berechnung der Kantenlänge des regulären Fünfecksoder
 erhält man aus
erhält man aus  .
.Aus
 und lassen sich dann z. B.
und lassen sich dann z. B.  und dann rekursiv auch alle
und dann rekursiv auch alle  ,
,  berechnen.
berechnen.Generell gilt, dass
 und
und  zumindest dann explizit mit den Grundrechenarten und Quadratwurzeln darstellbar sind, wenn der Winkel
zumindest dann explizit mit den Grundrechenarten und Quadratwurzeln darstellbar sind, wenn der Winkel  mit Zirkel und Lineal konstruierbar ist, insbesondere also wenn von der Gestalt
mit Zirkel und Lineal konstruierbar ist, insbesondere also wenn von der Gestalt  ist, wobei ,
ist, wobei ,  und die
und die  für
für  Fermatsche Primzahlen sind [5]. In obigem Beispiel von
Fermatsche Primzahlen sind [5]. In obigem Beispiel von  ist
ist  und der Nenner gleich
und der Nenner gleich 
Umkehrfunktion
- Hauptartikel: Arkussinus und Arkuskosinus
Da sich zu einem gegebenen Wert
![\sin\alpha\in [-1,1]](/pictures/dewiki/48/0e0235ac472f74f7aec44c9c72d68f9a.png) ein passender Winkel im ersten oder vierten Quadranten und zu einem gegebenen Wert
ein passender Winkel im ersten oder vierten Quadranten und zu einem gegebenen Wert ![\cos\alpha\in [-1,1]](/pictures/dewiki/97/a95496080b6abbbd75ed5686db67d050.png) ein passender Winkel im ersten oder zweiten Quadranten konstruieren lässt, folgt aus diesen geometrischen Überlegungen, dass die Funktionen
ein passender Winkel im ersten oder zweiten Quadranten konstruieren lässt, folgt aus diesen geometrischen Überlegungen, dass die FunktionenUmkehrfunktionen besitzen. Die Umkehrfunktionen
werden Arkussinus bzw. Arkuskosinus genannt. Der Name rührt daher, dass sich deren Wert nicht nur als Winkel, sondern auch als Länge eines Kreisbogens (Arcus bedeutet Bogen) interpretieren lässt.
In der Analysis ist die Angabe des Wertebereichs im Bogenmaß richtig, da die Winkelfunktionen dort für das Bogenmaß definiert sind:
Eine andere Interpretation des Wertes als doppelter Flächeninhalt des dazugehörigen Kreissektors am Einheitskreis ist ebenfalls möglich; diese Interpretation ist insbesondere für die Analogie zwischen Kreis- und Hyperbelfunktionen nützlich.
Stetigkeit
Da die Sinusfunktion
und die Kosinusfunktion
monoton, surjektiv und invertierbar sind, folgt, dass sie in diesen Quadranten stetig sind. Da die Funktionen in den anderen Quadranten lediglich gespiegelt bzw. periodisch fortgesetzt sind, sind die Sinus- und Kosinusfunktion für alle reellen Argumente stetig.
Zusammenhang mit dem Skalarprodukt
Der Kosinus steht in enger Beziehung mit dem Skalarprodukt zweier Vektoren
 und
und  :
:das Skalarprodukt ist also die Länge der Vektoren multipliziert mit dem Kosinus des eingeschlossenen Winkels. In endlichdimensionalen Räumen lässt sich diese Beziehung aus dem Kosinussatz ableiten. In abstrakten Vektorräumen mit innerem Produkt wird über diese Beziehung der Winkel zwischen Vektoren definiert.
Zusammenhang mit dem Kreuzprodukt
- Hauptartikel: Kreuzprodukt
Der Sinus steht in enger Beziehung mit dem Kreuzprodukt zweier dreidimensionaler Vektoren
 und
und  :
:Additionstheoreme
- Hauptartikel: Formelsammlung Trigonometrie
Die Additionstheoreme der trigonometrischen Funktionen
erhält man relativ einfach aus der Flächenformel des allgemeinen Dreiecks, zerlegt in zwei rechtwinklige Dreiecke mit gemeinsamer Höhe h und den Teilwinkeln α und β
andererseits ergibt diese Zerlegung:
 .
.
Hieraus folgt das Additionstheorem für den Sinus. Setzen wir darin
 für
für  , so ergibt sich wegen
, so ergibt sich wegen  und
und  das Additionstheorem für den Kosinus.
das Additionstheorem für den Kosinus.Ein alternativer Beweis ist mit Hilfe des Skalarproduktes möglich:
Die Vektoren
 und
und  der Länge 1 schließen den Winkel α − β ein; mit dem Skalarprodukt folgt also das Additionstheorem für den Kosinus:
der Länge 1 schließen den Winkel α − β ein; mit dem Skalarprodukt folgt also das Additionstheorem für den Kosinus: .
.
Ableitung (Differenzierung) und Integration von Sinus und Kosinus
Differenzierung
Wird
im Bogenmaß angegeben, so gilt für die Ableitung der Sinusfunktion [6]Aus
 und der Kettenregel erhält man die Ableitung des Kosinus:
und der Kettenregel erhält man die Ableitung des Kosinus:und daraus schließlich auch alle höheren Ableitungen von Sinus und Kosinus
Wird der Winkel α in Grad gemessen, so kommt nach der Kettenregel bei jeder Ableitung ein Faktor
 dazu, also beispielsweise
dazu, also beispielsweise  . Um diese störenden Faktoren zu vermeiden, wird in der Analysis der Winkel ausschließlich im Bogenmaß angegeben; die Angabe von Winkel in Grad ist allerdings anschaulicher und daher bei geometrischen Überlegungen zweckmäßiger.
. Um diese störenden Faktoren zu vermeiden, wird in der Analysis der Winkel ausschließlich im Bogenmaß angegeben; die Angabe von Winkel in Grad ist allerdings anschaulicher und daher bei geometrischen Überlegungen zweckmäßiger.Integration
Aus den Ergebnissen über die Ableitung ergibt sich unmittelbar die Stammfunktion von Sinus und Kosinus im Bogenmaß:
Anwendungen
Geometrische Anwendungen
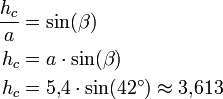
 Skizze zum Beispiel
Skizze zum BeispielMit der Definition des Sinus können auch im nicht rechtwinkligen Dreieck Größen, speziell die Höhen, berechnet werden; ein Beispiel ist die Berechnung von hc im Dreieck ABC bei gegebener Länge a = 5,4 und Winkel
 :
:Andere wichtige Anwendungen sind der Sinussatz und der Kosinussatz.
Fourierreihen
Im Hilbertraum
![L^2 [-\pi,\pi]\!](/pictures/dewiki/101/e7730af59ce7daba31cfd1446eacc8eb.png) der auf dem Intervall
der auf dem Intervall ![[-\pi,\pi]\!](/pictures/dewiki/97/ade9a883bf34e9d2b294799754e92b35.png) bezüglich des Lebesgue-Maßes quadratisch integrierbaren Funktionen bilden die Funktionen
bezüglich des Lebesgue-Maßes quadratisch integrierbaren Funktionen bilden die Funktionenein vollständiges Orthogonalsystem, das sogenannte trigonometrische System. Daher lassen sich alle Funktionen
![f\in L^2[-\pi,\pi]](/pictures/dewiki/99/c5d3cf46bba100126284518a3525feb1.png) als Fourierreihe
als Fourierreihedarstellen, wobei die Funktionenfolge
 in der L2-Norm gegen
in der L2-Norm gegen  konvergiert.
konvergiert.Physikalische Anwendungen
In der Physik werden Sinus- und Kosinusfunktion zur Beschreibung von Schwingungen verwendet. Insbesondere lassen sich durch die oben erwähnten Fourierreihen beliebige periodische Signale als Summe von Sinus- und Kosinusfunktionen darstellen, siehe Fourieranalyse.
Elektrotechnische Anwendungen
 Leistungszeigerdiagramm und Phasenverschiebungswinkel bei sinusförmigen Spannungen und Strömen.
Leistungszeigerdiagramm und Phasenverschiebungswinkel bei sinusförmigen Spannungen und Strömen.Als Faktor für die Berechnung der Leistung. Der Leistungsfaktor kann zwischen −1 und 1 liegen. Bei exakt sinusförmigen Strömen und Spannungen ist der Leistungsfaktor gleich dem Kosinus des Phasenverschiebungswinkels
; siehe nebenstehende Grafik. Es gilt für 
Bei nichtsinusförmigen Größen (z. B. bei einem Schaltnetzteil mit herkömmlichem Brückengleichrichter am Eingang) entstehen Oberschwingungen, bei denen sich kein einheitlicher Phasenverschiebungswinkel angeben lässt. Daher dürfen Leistungsfaktor λ und
 nicht verwechselt werden.
nicht verwechselt werden.Siehe auch
- Sekans und Kosekans
- Tangens und Kotangens
- Zusammenhang mit den Hyperbelfunktionen
- Sinussatz
- Kosinussatz
- Sinuston
Literatur
- I. N. Bronstein, K. A. Semendjajew: Taschenbuch der Mathematik. B. G. Teubner Verlagsgesellschaft Leipzig, 19. Auflage, 1979.
- Kurt Endl, Wolfgang Luh: Analysis I. Eine integrierte Darstellung, 7. Auflage, Aula-Verlag Wiesbaden, 1989.
- Heuser: Lehrbuch der Analysis - Teil 1, 6. Auflage, Teubner 1989.
Weblinks
- Java-Applet „Dreieck und Sinussatz“ zur Veranschaulichung
- Interaktive Animation zur Definition von Sinus, Kosinus und Tangens am Einheitskreis
- Dynamischer Graph der allgemeinen Sinus-Funktion (benötigt das Programm GeoGebra)
Einzelnachweise
- ↑ J. Ruska, Zur Geschichte des "Sinus". In: Zeitschrift für Mathematik und Physik, Leipzig: Teubner, 1895
- ↑ Josef Laub (Hrsg.) Lehrbuch der Mathematik für die Oberstufe der allgemeinbildenden höheren Schulen. 2. Band.. Hölder-Pichler-Tempsky, 2. Auflage, Wien 1977. ISBN 3-209-00159-6, S. 207.
- ↑ Milton Abramowitz und Irene Stegun: Handbook of Mathematical Functions, (1964) Dover Publications, New York. ISBN 0-486-61272-4 4.3.96 – 4.3.99
- ↑ Leopold Vietoris, Vom Grenzwert
 . Elemente Math. 12 (1957)
. Elemente Math. 12 (1957) - ↑ Emil Artin: Galoissche Theorie. Verlag Harri Deutsch, Zürich 1973, ISBN 3-87144-167-8, S. 85.
- ↑ Wikibooks: Beweisarchiv: Analysis: Differentialrechnung: Differentiation der Sinusfunktion
Primäre trigonometrische Funktionen
Sinus und Kosinus | Tangens und Kotangens | Sekans und KosekansUmkehrfunktionen (Arkusfunktionen)
Arkussinus und Arkuskosinus | Arkustangens und Arkuskotangens | Arkussekans und ArkuskosekansHyperbelfunktionen
Sinus Hyperbolicus und Kosinus Hyperbolicus | Tangens Hyperbolicus und Kotangens Hyperbolicus | Sekans Hyperbolicus und Kosekans HyperbolicusAreafunktionen
Areasinus Hyperbolicus und Areakosinus Hyperbolicus | Areatangens Hyperbolicus und Areakotangens Hyperbolicus | Areasekans Hyperbolicus und Areakosekans Hyperbolicus

























 eine
eine  und
und
 (
( (
( (
(![\begin{align}
\sin &amp;amp;: [-90^\circ, 90^\circ]&amp;amp;\to[-1,1]\\
\cos &amp;amp;: [0^\circ, 180^\circ]&amp;amp;\to[-1,1]
\end{align}](/pictures/dewiki/54/689833ac5e911f4522f3b17b4d9d8331.png)
![\begin{align}
\arcsin: [-1,1] &amp;amp;\to [-90^\circ, 90^\circ] \\
\arccos: [-1,1] &amp;amp;\to [0^\circ, 180^\circ]
\end{align}](/pictures/dewiki/100/d5442e716b3e534eeb1ff84b535b23b9.png)
![\begin{align}
\arcsin: [-1,1] &amp;amp;\to \left[-\tfrac{\pi}{2}, \tfrac{\pi}{2} \right] \\
\arccos: [-1,1] &amp;amp;\to \left[0, \pi \right]
\end{align}](/pictures/dewiki/55/7a2b97615c3b87d4edf2981141c8cc60.png)
![\sin : [- \pi/2, \pi/2]\to[-1,1]](/pictures/dewiki/49/1709cca8a4a4631b922c43810a6c9f24.png)
![\cos : [0, \pi]\to[-1,1]](/pictures/dewiki/98/ba32019ae97244506c6525da6a574f70.png)













Wikimedia Foundation.