- Kontaktmechanik
-
 Spannungen in einem Kontaktgebiet unter gleichzeitiger Belastung durch eine Normalkraft und eine Tangentialkraft. Die Spannungen wurden mittels Spannungsoptik sichtbar gemacht.
Spannungen in einem Kontaktgebiet unter gleichzeitiger Belastung durch eine Normalkraft und eine Tangentialkraft. Die Spannungen wurden mittels Spannungsoptik sichtbar gemacht.
Die Kontaktmechanik beschäftigt sich mit der Berechnung von elastischen, viskoelastischen oder plastischen Körpern im statischen oder dynamischen Kontakt. Kontaktmechanik ist eine grundlegende ingenieurwissenschaftliche Disziplin, die für einen sicheren und energiesparenden Entwurf technischer Anlagen unabdingbar ist.
Sie ist vom Interesse für Anwendungen, wie zum Beispiel Rad-Schiene-Kontakt, Kupplungen, Bremsen, Reifen, Gleit- und Kugellager, Verbrennungsmotoren, Gelenke, Dichtungen, Umformung, Materialbearbeitung, Ultraschallschweißen, elektrische Kontakte und viele andere. Ihre Aufgaben reichen vom Festigkeitsnachweis von Kontakt- und Verbindungselementen über die Beeinflussung von Reibung und Verschleiß durch Schmierung oder Materialdesign bis hin zu Anwendungen in der Mikro- und Nanosystemtechnik.
Geschichte
Die klassische Kontaktmechanik ist vor allem mit Heinrich Hertz verbunden. Im Jahr 1882 löste Hertz das Problem des Kontaktes zwischen zwei elastischen Körpern mit gekrümmten Oberflächen (siehe dazu den Artikel Hertzsche Pressung). Dieses klassische Ergebnis bildet auch heute eine Grundlage der Kontaktmechanik. Weitere frühe analytische Arbeiten zu diesem Thema gehen auf J. V. Boussinesq sowie V. Cerruti zurück.
Erst ein knappes Jahrhundert später fanden Johnson, Kendall und Roberts eine ähnliche Lösung wie die von Hertz für einen adhäsiven Kontakt (JKR-Theorie).
Ein weiterer Fortschritt unserer Kenntnisse über Kontaktmechanik liegt in der Mitte des 20. Jahrhunderts und ist mit den Namen Bowden und Tabor verbunden. Sie haben als Erste auf die Wichtigkeit der Rauheit der kontaktierenden Körper hingewiesen. Durch die Rauheit ist die wahre Kontaktfläche zwischen Reibpartnern typischerweise um Größenordnungen kleiner als die scheinbare Fläche. Diese Einsicht veränderte schlagartig die Richtung auch vieler tribologischer Untersuchungen. Die Arbeiten von Bowden und Tabor haben eine Reihe von Theorien zur Kontaktmechanik von rauen Oberflächen angestoßen.
Als Pionierarbeiten auf diesem Gebiet sollen vor allem die Arbeiten von Archard (1957) erwähnt werden, der zu dem Schluss gekommen ist, dass auch im Kontakt von elastischen, rauen Oberflächen die Kontaktfläche ungefähr proportional zur Normalkraft ist. Weitere wichtige Beiträge sind mit den Namen Greenwood und Williamson (1966), Bush (1975) und Persson (2002) verbunden. Das Hauptergebnis dieser Arbeiten ist, dass die wahre Kontaktfläche bei rauen Oberflächen im groben proportional zur Normalkraft ist, während die Bedingungen in einzelnen Mikrokontakten (Druck, Größe des Mikrokontaktes) nur schwach von der Belastung abhängen.
Heute werden viele Aufgaben der Kontaktmechanik mit Simulationsprogrammen bearbeitet, die auf der Methode der Finiten Elemente oder der Randelementmethode basieren. Hierzu gibt es eine große Anzahl von wissenschaftlichen Beiträgen, einige sind neben den Grundlagen der numerischen Kontaktmechanik in den Büchern von Laursen (2002) und Wriggers (2006) zu finden.
Klassische Kontaktaufgaben
Kontakt zwischen einer Kugel und einem elastischen Halbraum
 Kontakt zwischen einer Kugel und einem elastischen Halbraum
Kontakt zwischen einer Kugel und einem elastischen HalbraumIst eine elastische Kugel mit dem Radius R in einen elastischen Halbraum um den Betrag d eingedrückt (Eindrucktiefe), so bildet sich ein Kontaktgebiet mit dem Radius
 . Die dafür erforderliche Kraft ist gleich
. Die dafür erforderliche Kraft ist gleich ,
,wobei
 .
.E1 und E2 sind hier die Elastizitätsmoduln sowie ν1 und ν2 die Poisson-Zahlen beider Körper.
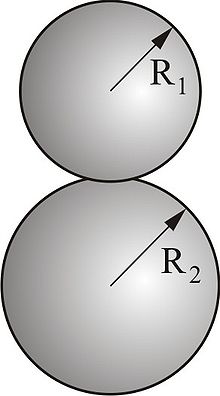 Kontakt zwischen zwei Kugeln
Kontakt zwischen zwei KugelnSind zwei Kugeln mit den Radien R1 und R2 im Kontakt, so gelten diese Gleichungen weiterhin mit dem Radius R gemäß

Die Druckverteilung im Kontaktgebiet ist gegeben durch

mit
 .
.Die maximale Schubspannung liegt im Inneren, für ν = 0,33 bei
 .
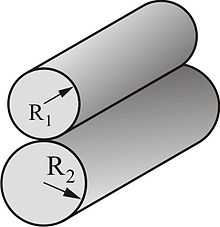
.Kontakt zwischen zwei gekreuzten Zylindern mit gleichen Radien R
 Kontakt zwischen zwei gekreuzten Zylindern mit gleichen Radien
Kontakt zwischen zwei gekreuzten Zylindern mit gleichen Radienist äquivalent zum Kontakt zwischen einer Kugel mit dem Radius R und einer Ebene (s. oben).
Kontakt zwischen einem starren Zylinder und einem elastischen Halbraum
 Kontakt zwischen einem starren zylindrischen Indenter und einem elastischen Halbraum
Kontakt zwischen einem starren zylindrischen Indenter und einem elastischen HalbraumWird ein starrer zylindrischer Stempel mit dem Radius a in einen elastischen Halbraum eingedrückt, so ist die Druckverteilung durch

gegeben mit
 .
.Der Zusammenhang zwischen der Eindrucktiefe und der Normalkraft lautet
 .
.Kontakt zwischen einem starren kegelförmigen Indenter und dem elastischen Halbraum
 Kontakt zwischen einem Kegel und einem elastischen Halbraum
Kontakt zwischen einem Kegel und einem elastischen HalbraumBei Indentierung eines elastischen Halbraumes durch einen starren kegelförmigen Indenter sind die Eindrucktiefe und der Kontaktradius durch die Beziehung

gegeben. θ ist der Winkel zwischen der Ebene und der Seitenfläche des Kegels. Die Druckverteilung hat die Form
 .
.Die Spannung hat an der Spitze des Kegels (im Zentrum des Kontaktgebietes) eine logarithmische Singularität. Die Gesamtkraft berechnet sich zu
 .
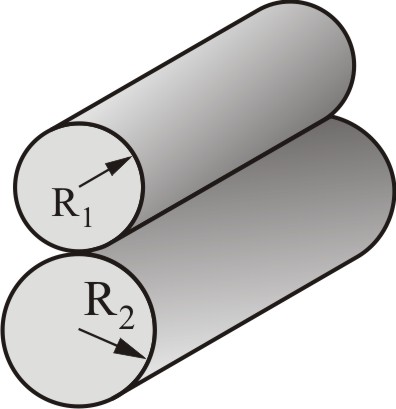
.Kontakt zwischen zwei Zylindern mit parallelen Achsen
 Kontakt zwischen zwei Zylindern mit parallelen Achsen
Kontakt zwischen zwei Zylindern mit parallelen AchsenIm Falle eines Kontaktes zwischen zwei Zylindern mit parallelen Achsen ist die Kraft linear proportional zur Eindrucktiefe:
 .
.Der Krümmungsradius erscheint in dieser Beziehung überhaupt nicht. Die halbe Kontaktbreite wird durch dieselbe Beziehung
,mit
gegeben, wie im Kontakt zwischen zwei Kugeln. Der maximale Druck ist gleich
 .
.Kontakt zwischen rauen Oberflächen
Wenn zwei Körper mit rauen Oberflächen aneinander gedrückt werden, so ist die reale Kontaktfläche A zunächst viel kleiner als die scheinbare Fläche A0. Bei einem Kontakt zwischen einer „zufällig rauen“ Oberfläche und einem elastischen Halbraum ist die reale Kontaktfläche proportional zur Normalkraft F und ist durch die Gleichung

gegeben, wobei h' der quadratische Mittelwert der Steigung der Oberfläche ist und
 . Der mittlere Druck in der wahren Kontaktfläche
. Der mittlere Druck in der wahren Kontaktfläche
berechnet sich in guter Näherung als die Hälfte des effektiven elastischen Moduls E * multipliziert mit dem quadratischen Mittelwert der Steigung h' des Oberflächenprofils. Ist dieser Druck größer als die Härte σ0 des Materials und somit
 ,
,sind die Mikrorauigkeiten vollständig im plastischen Zustand. Für
 verhält sich die Oberfläche beim Kontakt elastisch. Die Größe Ψ wurde von Greenwood und Williamson eingeführt und wird Plastizitätsindex genannt. Die Tatsache, ob sich das System elastisch oder plastisch verhält, hängt nicht von der angelegten Normalkraft ab.
verhält sich die Oberfläche beim Kontakt elastisch. Die Größe Ψ wurde von Greenwood und Williamson eingeführt und wird Plastizitätsindex genannt. Die Tatsache, ob sich das System elastisch oder plastisch verhält, hängt nicht von der angelegten Normalkraft ab.Literatur
- K. L. Johnson: Contact mechanics. Cambridge University Press, 6. Nachdruck der 1. Auflage, 2001.
- Popov, Valentin L.: Kontaktmechanik und Reibung. Ein Lehr- und Anwendungsbuch von der Nanotribologie bis zur numerischen Simulation, Springer-Verlag, 2009, 328 S., ISBN 978-3-540-88836-9.
- Popov, Valentin L.: Contact Mechanics and Friction. Physical Principles and Applications, Springer-Verlag, 2010, 362 p., ISBN 978-3-642-10802-0.
- I. N. Sneddon: The Relation between Load and Penetration in the Axisymmetric Boussinesq Problem for a Punch of Arbitrary Profile. Int. J. Eng. Sci.,1965, v. 3, pp. 47–57.
- S. Hyun, M.O. Robbins: Elastic contact between rough surfaces: Effect of roughness at large and small wavelengths. Trobology International, 2007, v.40, pp. 1413–1422.
- T. A. Laursen: Computational Contact And Impact Mechanics: Fundamentals Of Modeling Interfacial Phenomena In Nonlinear Finite Element Analysis, Springer, 2002.
- P. Wriggers: Computational Contact Mechanics, 2. Edition, Springer, 2006.






Wikimedia Foundation.