- Finite-Elemente-Analyse
-
Die Finite-Elemente-Methode (FEM) ist ein numerisches Verfahren zur näherungsweisen Lösung, insbesondere elliptischer partieller Differentialgleichungen mit Randbedingungen. Sie ist auch ein weit verbreitetes modernes Berechnungsverfahren im Ingenieurwesen.
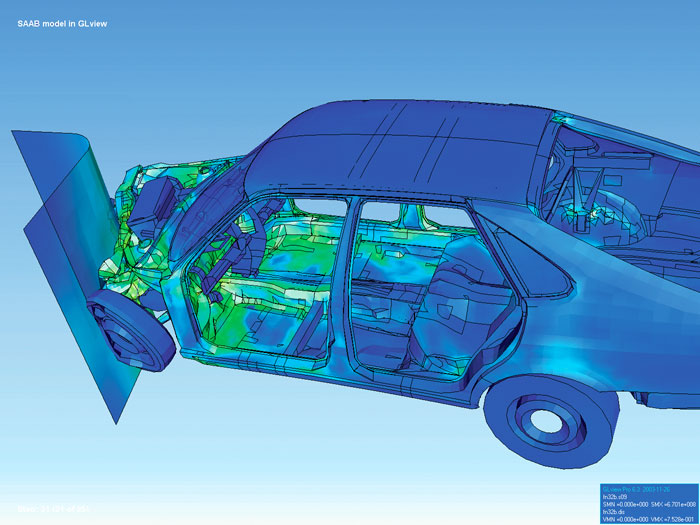
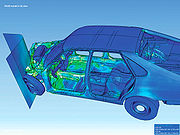 Visualisierung einer FEM-Simulation der Verformung eines Autos bei asymmetrischem Frontalaufprall
Visualisierung einer FEM-Simulation der Verformung eines Autos bei asymmetrischem FrontalaufprallInhaltsverzeichnis
Einführung
Mit der FE-Methode können Probleme aus verschiedenen physikalischen Disziplinen berechnet werden, da es sich grundsätzlich um ein numerisches Verfahren zur Lösung von Differentialgleichungen handelt. Zunächst wird das Berechnungsgebiet in eine beliebig große Anzahl Elemente unterteilt. Diese Elemente sind „endlich" (finit) und nicht unendlich (infinit) klein, die Anzahl der Elemente ist „endlich“ und nicht unendlich. Das Aufteilen des Gebiets in eine bestimmte Anzahl Elemente finiter Größe, die sich mit einer endlichen Zahl von Parametern beschreiben lassen, gab der Methode den Namen „Finite-Elemente-Methode".
Innerhalb dieser Elemente werden Ansatzfunktionen definiert (z. B. lokale Ritz-Ansätze je Element). Setzt man diese Ansatzfunktionen in die zu lösende Differentialgleichung ein, erhält man zusammen mit den Anfangs-, Rand- und Übergangsbedingungen ein Gleichungssystem, welches in der Regel numerisch gelöst wird. Die Größe des zu lösenden Gleichungssystems hängt maßgeblich von der Anzahl der finiten Elemente ab. Die Lösung dieses Gleichungssystems stellt letztlich die numerische Lösung der betrachteten Differentialgleichung dar.
Allgemeines Vorgehen
Das untersuchte Lösungsgebiet G wird zunächst in Teilgebiete, die finiten Elemente, eingeteilt.
 bzw.
bzw. 
Innerhalb des finiten Elements werden für die gesuchte Lösung je n Ansatzfunktionen definiert, die nur auf wenigen der Teilgebiete ungleich Null sind. (Diese Eigenschaft ist der eigentliche Grund für die Bezeichnung „finite“ Elemente.) Durch eine Linearkombination der n Ansatzfunktionen innerhalb des Elementes werden die möglichen Lösungen der numerischen Näherung festgelegt und für jedes Element eine Elementmatrix aufgestellt. In der Anwendung sind die Lösungen zum Beispiel durch Materialeigenschaften und Stoffgesetze bestimmt.
Die Differentialgleichungen und die Randbedingungen werden mit Testfunktionen (
 ) multipliziert und über das Lösungsgebiet integriert. Das Integral wird durch eine Summe über einzelne Integrale der Finiten Elemente ersetzt, wobei die Integration in der Regel durch eine näherungsweise numerische Integration ausgeführt wird. Da die Ansatzfunktionen nur auf wenigen der Elemente ungleich Null sind, ergibt sich ein dünnbesetztes, häufig sehr großes, lineares Gleichungssystem, bei dem die Faktoren der Linearkombination unbekannt sind.
) multipliziert und über das Lösungsgebiet integriert. Das Integral wird durch eine Summe über einzelne Integrale der Finiten Elemente ersetzt, wobei die Integration in der Regel durch eine näherungsweise numerische Integration ausgeführt wird. Da die Ansatzfunktionen nur auf wenigen der Elemente ungleich Null sind, ergibt sich ein dünnbesetztes, häufig sehr großes, lineares Gleichungssystem, bei dem die Faktoren der Linearkombination unbekannt sind.Diese große Gesamtmatrix bildet man, indem man die Elementmatrizen aufaddiert. Die Gesamtmatrix ist quadratisch, hat also genauso viele Zeilen wie Spalten.
Die Dimension der Matrix ergibt sich aus der Anzahl der Elemente multipliziert mit der Anzahl der Ansatzfunktionen je Element. Abhängig vom Elementtyp und der geforderten Stetigkeit des Ansatzes gehen Ansatzfunktionen benachbarter Elemente nur ein mal in die Gesamtmatrix ein. Die Dimension der Matrix wird auch als Anzahl der Freiheitsgrade bezeichnet. Die Gesamtmatrix enthält dort Zahlenwerte, wo Freiheitsgrade in Elementen oder zwischen benachbarten Elementen miteinander verbunden sind; an allen anderen Stellen sind sie Null.
Weil jedes Element nur mit wenigen benachbarten Elementen verbunden ist, sind die meisten Werte der Gesamtmatrix Null, so dass sie „dünnbesetzt“ ist. In den allermeisten Anwendungsfällen werden die gleichen Funktion als Ansatz- und Testfunktionen verwendet. In diesem Fall ist die Matrix außerdem symmetrisch zu ihrer Diagonalen. Die Matrix ist der linke Teil (A) des weiter unten hergeleiteten linearen Gleichungssystems
 ,
,
- mit
- A = Matrix, z. B. Gesamtsteifigkeitsmatrix
- u = Vektor der unbekannten Funktionswerte bzw. Dirichlet-Randbedingungen (s.u.), zum Beispiel Verschiebungen
- f = Vektor der Neumann-Randbedingungen (s.u.), zum Beispiel Kräfte
der Grundgleichung der FE-Methode.
Ist die Anzahl der Freiheitsgrade nicht allzu groß (bis ca. 500.000), lässt sich dieses Gleichungssystem am effizientesten mittels eines direkten Verfahrens lösen, zum Beispiel mit dem gaußschen Eliminationsverfahren. Hierbei kann die dünnbesetzte Struktur des Gleichungssystems effektiv genutzt werden. Während beim Gauß-Algorithmus der Berechnungsaufwand für N Gleichungen O(N3) beträgt, lässt sich der Aufwand durch geschickte Pivotwahl (zum Beispiel Markowitz-Algorithmus oder graphentheoretische Ansätze) aber deutlich reduzieren.
Für mehr als 500.000 Unbekannte bereitet die schlechte Kondition des Gleichungssystems den direkten Lösern zunehmend Schwierigkeiten, so dass man für große Probleme im Allgemeinen iterative Löser, die schrittweise eine Lösung verbessern, verwendet. Einfache Beispiele dafür sind das Jacobi- und Gauß-Seidel-Verfahren, praktisch werden aber eher Mehrgitterverfahren oder vorkonditionierte Krylow-Unterraum-Verfahren, wie das Verfahren der konjugierten Gradienten oder GMRES, verwendet. Aufgrund der Größe der Gleichungssysteme ist manchmal der Einsatz von Parallelrechnern nötig.
Ist die partielle Differentialgleichung nichtlinear, ist auch das resultierende Gleichungssystem nichtlinear. Ein solches lässt sich in der Regel nur über numerische Näherungsverfahren lösen. Ein Beispiel für ein solches Verfahren ist das Newton-Verfahren, in dem schrittweise ein lineares System gelöst wird.
Es gibt heute eine Vielzahl von kommerziellen Computerprogrammen, die nach der Methode der Finiten Elemente arbeiten.
Mathematische Herleitung der Methode
Variationsformulierung
Eine Variationsformulierung ist folgendes Problem: Gegeben sei ein Hilbertraum H, eine Funktion
 , sowie eine auf H stetige und elliptische Bilinearform
, sowie eine auf H stetige und elliptische Bilinearform  , so heißt
, so heißt  Lösung des Variationsproblems, wenn
Lösung des Variationsproblems, wenn .
.
Existenz und Eindeutigkeit der Lösung u liefert der Satz von Riesz-Fischer (für den Fall, dass die Bilinearform a symmetrisch ist) bzw. das Lemma von Lax-Milgram (allgemeiner Fall).
Wir wissen, dass der Raum
 ein Hilbert-Raum ist. Ausgehend hiervon kann man die Sobolewräume Hs(Ω) über die sogenannte schwache Ableitung definieren.
ein Hilbert-Raum ist. Ausgehend hiervon kann man die Sobolewräume Hs(Ω) über die sogenannte schwache Ableitung definieren.Das Problem a(u,v) = f(v) kann man als eine Variante einer partiellen Differentialgleichung auf einem Gebiet Ω auffassen.
Das Poissonproblem als Beispiel:
wobei hier Δ den Laplace-Operator bezeichnet. Eine Multiplikation mit unendlich oft stetig differenzierbaren Funktionen
 ergibt nach einer Integration
ergibt nach einer IntegrationEine partielle Integration (Satz von Green) sowie die Nullrandbedingungen für ψ liefern dann
Nun ist
 eine elliptische und stetige Bilinearform auf
eine elliptische und stetige Bilinearform auf  , sowie die rechte Seite
, sowie die rechte Seite  nach dem Satz von Riesz eine stetige Linearform auf
nach dem Satz von Riesz eine stetige Linearform auf 
Besitzt der betrachtete Funktionenraum/Hilbert-Raum eine endliche Basis, so kann man ein lineares Gleichungssystem aus der Variationsformulierung gewinnen.
Für Funktionenräume entscheidet die Wahl der Basis über die Effizienz des Verfahrens. Gängig sind hierbei die Verwendung von Splines mit Triangulierungen, sowie in bestimmten Fällen die diskrete Fourier-Transformation (Aufspaltung in Sinus und Cosinus).
Aufgrund von Flexibilitätsüberlegungen bezüglich der Geometrie des Gebietes Ω wird in der Regel folgender Ansatz gewählt.
Man diskretisiert das Gebiet Ω, indem man es in Dreiecke zerteilt und man benutzt Splines λp(x), assoziiert mit den Eckpunkten p, um den endlichdimensionalen Funktionenraum auf Ω aufzuspannen. Die Splines erfüllen an festgelegten Punkten auf den Dreiecken λp(q) = δpq (wobei δ das Kronecker-Delta ist). Damit kann man dann eine diskrete Funktion uh(x) darstellen durch
-
uh(x) = ∑ upλp(x) p
mit up den Koeffizienten bezüglich der Basisdarstellung. Aufgrund der endlichen Basis muss man nicht mehr gegen alle
 testen, sondern nur noch gegen alle Basisfunktionen, die Variationsformulierung reduziert sich aufgrund der Linearität auf
testen, sondern nur noch gegen alle Basisfunktionen, die Variationsformulierung reduziert sich aufgrund der Linearität aufAlso haben wir ein lineares Gleichungssystem zum Lösen gewonnen
- ,
mit
- Apq = a(λp,λq)
und
- fq = (f,λq)
Dieses Resultat erhält man mit jeder endlichen Basis des Hilbert-Raumes.
Diskretisierung
Die gegebene Aufgabe wird diskretisiert, indem ganz allgemein das Grundgebiet in einfache Teilgebiete, die so genannten Elemente, in endlicher (finiter) Anzahl, zerlegt wird. Bei gewissen Aufgabenstellungen ist die Aufteilung in Elemente durch das Problem bereits weitgehend vorgegeben, zum Beispiel bei räumlichen Fachwerken, bei denen die einzelnen Stäbe die Elemente der Konstruktion bilden. Das gilt auch bei Rahmenkonstruktionen, wo die einzelnen Balken oder unterteilte Balkenstücke die Elemente der Aufgabe darstellen.
Bei zweidimensionalen Problemen wird das Grundgebiet in Dreiecke, Parallelogramme, krummlinige Dreiecke oder Vierecke eingeteilt. Selbst wenn nur geradlinige Elemente verwendet werden, erreicht man mit einer entsprechend feinen Diskretisierung eine recht gute Approximation (Annäherung) des Grundgebietes. Krummlinige Elemente erhöhen die Güte der Annäherung. Jedenfalls erlaubt diese Diskretisierung eine flexible und auch dem Problem angepasste Erfassung des Grundgebietes. Allerdings muss darauf geachtet werden, dass sehr spitze oder überstumpfe Winkel in den Elementknoten vermieden werden, um numerische Schwierigkeiten auszuschließen. Dann wird das gegebene Gebiet durch die Fläche der approximierenden Elemente ersetzt. Mit dem Patch-Test kann man später überprüfen, ob das gut gelungen ist.
Räumliche Probleme werden mit einer Diskretisierung des dreidimensionalen Gebietes in Tetraederelemente, Quaderelemente oder andere dem Problem angepasste, möglicherweise auch krummflächig berandete Elemente, dies sind i. d. R. Serendipity- oder Lagrange-Elemente, bearbeitet.
Element-Ansatz
In jedem der Elemente wird für die gesuchte Funktion, bzw. allgemeiner für die das Problem beschreibenden Funktionen, ein problemgerechter Ansatz gewählt. Im Besonderen eignen sich dazu ganze rationale Funktionen in den unabhängigen Raumkoordinaten. Für eindimensionale Elemente (Stäbe, Balken) kommen Polynome ersten, zweiten, dritten und gelegentlich sogar höheren Grades in Frage. Bei zweidimensionalen Problemen finden lineare, quadratische oder höhergradige Polynome Verwendung. Die Art des Ansatzes hängt dabei einerseits von der Form des Elementes ab, und andererseits kann auch das zu behandelnde Problem den zu wählenden Ansatz beeinflussen. Denn die Ansatzfunktionen müssen beim Übergang von einem Element ins benachbarte ganz bestimmte problemabhängige Stetigkeitsbedingungen erfüllen. Die Stetigkeitsanforderungen sind häufig aus physikalischen Gründen offensichtlich und aus mathematischen Gründen auch erforderlich. Zum Beispiel muss die Verschiebung eines zusammenhängenden Körpers in einer Richtung beim Übergang von einem Element zum anderen stetig sein, um die Kontinuität des Materials zu gewährleisten. Im Fall der Balken- oder Plattenbiegung sind die Stetigkeitsanforderungen höher, da dort aus analogen physikalischen Gründen sogar die Stetigkeit der ersten Ableitung bzw. der beiden ersten partiellen Ableitungen gefordert werden muss. Elemente mit Ansatzfunktionen, welche den Stetigkeitsbedingungen genügen, heißen konform.
Um nun die Stetigkeitsanforderungen tatsächlich zu erfüllen, muss der Funktionsverlauf im Element durch Funktionswerte und auch durch Werte von (partiellen) Ableitungen (den Knotenpunktverschiebungen) in bestimmten Punkten des Elementes, den Knotenpunkten, ausgedrückt werden. Die in den Knotenpunkten benutzten Funktionswerte und Werte von Ableitungen nennt man die Knotenvariablen des Elements. Mit Hilfe dieser Knotenvariablen stellt sich die Ansatzfunktion als Linearkombination von sogenannten Formfunktionen mit den Knotenvariablen als Koeffizienten dar.
Es ist zweckmäßig, für die Knotenpunktkoordinaten neben einem elementbezogenen lokalen ein globales Koordinatensystem zu verwenden. Beide werden durch Transformationsfunktionen miteinander verknüpft. Werden für diese Transformation dieselben Formfunktionen wie für den Verformungsansatz benutzt, so sind es isoparametrische Elemente, bei Funktionen niedrigeren bzw. höheren Grades sub- bzw. superparametrische Elemente.
Formale Definition des finiten Elementes (nach Ciarlet)
Ein finites Element ist ein Tripel E = (T,Π,Σ), wobei:
- T ist ein nichtleeres Gebiet (z. B. Dreiecke, Vierecke, Tetraeder, usw.)
- Π ist ein endlichdimensionaler Raum von Ansatzfunktionen (lineare, quadratische oder kubische Formfunktionen, also Splines; Sinus, usw.)
 Formfunktionen
Formfunktionen - Σ ist eine Menge von linear unabhängigen Funktionalen auf Π Knotenvariablen
Es gelte für die Funktionale, dass sie zu Funktionen der Basis assoziiert seien:
So gilt für jede Funktion
 .
.
Für Sinus als Basisfunktion im
 ist dann
ist dannund die Funktionale
 .
.
Für Splines genügt dahingegen die Punktauswertung auf den festgelegten Punkten der Dreiecke: σp(ψ): = ψ(p).
Randbedingungen
Problemstellung Dirichlet-Randbedingung/Funktionswert Neumann-Randbedingung statisches Problem Auflagerbedingung/Verschiebung Kraft Sickerströmung Standrohrspiegelhöhe Quelle oder Senke Wärmeleitung Temperatur Wärmequelle elektrischer Strom elektrische Spannung Stromstärke Elektrostatik elektrische Spannung elektrische Ladung Magnetostatik magnetisches Potenzial magnetischer Fluss Nachdem ein gegebenes Problem diskretisiert ist und die Elementmatrizen aufgestellt sind, führt man vorgegebene Randbedingungen ein. Ein typisches FE-Problem kann zwei Arten von Randbedingungen haben: Dirichlet-Randbedingungen und Neumann-Randbedingungen. Sie gelten (wirken) immer an den Knotenpunkten.
Eine Dirichlet-Randbedingung gibt einen Funktionswert direkt vor und eine Neumann-Randbedingung gibt eine Ableitung eines Funktionswertes vor. Ist eine Dirichlet-Randbedingung vorgegeben, bedeutet dies, dass das Problem einen Freiheitsgrad weniger bekommt und die zugehörige Zeile und Spalte in der Gesamtmatrix gestrichen wird. Ist die Dirichlet-Randbedingung ungleich Null, so wird der Wert entsprechend seinem Vorfaktor der Linearform ("rechten Seite") hinzugefügt. Je nach Art des physikalischen Problems kann es sich um verschiedene physikalische Größen handeln wie in der Tabelle beispielhaft dargestellt. Die Neumann-Randbedingungen haben des Weiteren einen Anteil an der Linearform ("rechte Seite").
Das Prinzip vom Minimum der potenziellen Energie
Bei einem statischen Problem werden nun die Knotenpunktverschiebungen aus der Bedingung ermittelt, dass im gesuchten Gleichgewichtszustand die potenzielle Energie ein Minimum hat. Das Prinzip vom Minimum der potenziellen Energie bildet eine der möglichen Variationsmethoden zur direkten Bestimmung von Steifigkeitsgleichungen finiter Elemente. Die potenzielle Energie einer Konstruktion ist die Summe aus der inneren Verzerrungsenergie (der elastischen Formänderungsenergie) und dem Potenzial der aufgebrachten Lasten (der von äußeren Kräften geleisteten Arbeit). Bei anderen Problemstellungen gibt es ein solches natürliches Minimalprinzip nicht. Dort behilft man sich damit, dass man den Restfehler minimiert. Dies ist die Methode der gewichteten Residuen nach Galerkin, auch Galerkin-Methode oder Galerkin-Ansatz genannt.
Anwendung
Ursprünglich wurde die Finite-Elemente-Methode zur Lösung von Festkörper-Problemen entwickelt, obwohl die Bezeichnung „Finite Elemente“ erst etwas später benutzt wurde. Im weiteren Verlauf der Forschung wurde die Finite-Elemente-Methode immer weiter verallgemeinert und kann nun mehr in vielen physikalischen Problemstellungen, u. a. in verschieden gekoppelten Feldberechnungen, eingesetzt werden. Mittlerweile findet die Methode in allen Gebieten der Technik einschließlich Wettervorhersage und Medizintechnik ihre Anwendung, im Fahrzeugbau bei Kleinteilen über Motor und Fahrwerk bis hin zur Karosserieberechnung einschließlich Crash-Verhalten.
Siehe auch: Topologieoptimierung
Geschichte der FEM
Der Einsatz der FEM in der Praxis begann in den 1950er Jahren bei einer Strukturberechnung von Flugzeugflügeln in der Luft- und Raumfahrtindustrie (Turner, Clough 1956) und sehr bald auch im Fahrzeugbau. Die Methode basiert hier auf den Arbeiten bei der Daimler AG in Stuttgart, die das selbst entwickelte FEM-Programm ESEM (Elektrostatik-Element-Methode) einsetzte, lange bevor die computerunterstützte Konstruktion (CAD) Anfang der 1980er Jahre ihren Einzug hielt. Der Ausdruck Finite-Elemente-Methode wurde erstmals 1960 von R. W. Clough vorgeschlagen und wird seit den 1970er Jahren überall verwendet.
Die Geschichte der Finite-Elemente-Methode erschließt sich aus den Forschungen und Veröffentlichungen der folgenden Autoren (Auswahl):
- Karl Schellbach: Variationsrechnung[1]; Lösung eines Minimalflächenproblems (1851/52)
- Kirsch (1868): Modellierung eines 3D-Kontinuums mit Quadern und Stabelementen
- John William Strutt, 3. Baron Rayleigh (1842–1919): On the theory of resonance. 1870[2]
- Walter Ritz (1878–1909): neue Methode zur Lösung von Variationsproblemen [3], Ritz’sches Verfahren (1908/09)
- Boris G. Galerkin (1871–1945): Verfahren der gewichteten Residuen (1915)
- Trefftz (1926): lokal begrenzte Ansatzfunktionen; Gegenstück zum Ritz′schen Verfahren
- Ebner (1929): Schubblech als ebenes Element im Flugzeugbau
- Alexander Hrennikoff (1896–1984): Stabmodelle, Ersetzen von Scheiben durch Fachwerke, Platten durch Trägerroste 1940/41
- Richard Courant (1888–1972): Variational methods for the solution of problems of equilibrium and vibration(s). 1943 (Ansatzfunktionen mit lokalem Träger, elementweise Ansätze für Schwingungsprobleme)
- William Prager (1903–1980), John Lighton Synge (1897–1995): Approximation in Elasticity based on the concept of function space. 1947
- John Argyris (1913–2004): Kraft- und Verschiebungsmethode für Stabtragwerke, Matrizenformulierung (1954/55)
- M. J. Turner, Ray W. Clough, H. C. Martin, L. J. Topp: Stiffness and deflection analysis of complex structures. 1956 (erste Strukturberechnung von Flugzeugflügeln bei Boeing, erste Anwendung der FEM mit Computerprogramm, erste Anwendung von Flächenelementen)
- Ray W. Clough (*1920): The finite element method in plane stress analysis. 1960 (wahrscheinlich erste Verwendung des Begriffs Finite Elemente)
- Spierig (1963): Entwicklung von Dreieckelementen, Übertragung auf Schalen
- Olgierd Cecil Zienkiewicz (1921-2009), Pionier der FEM und erstes Standardwerk (Lehrbuch): The Finite Element Method in Structural and Continuum Mechanics., 1967 (mit Y. K. Cheung)
- Alfred Zimmer (*1920) und Peter Groth (*1938), Pioniere der FEM, erstes deutsches FEM-Lehrbuch: Elementmethode der Elastostatik., 1969 Oldenbourg Verlag München, Wien
Allgemeine Lehrbücher
- Walter Zulehner: Numerische Mathematik - Eine Einführung anhand von Differentialgleichungsproblemen. Stationäre Probleme, Nr. 1, Birkhäuser, 2008, ISBN 9783764384265, S. 36.
- D. Braess: Finite Elemente - Theorie, schnelle Löser und Anwendungen in der Elastizitätstheorie. 3 Auflage. Springer, 2002, ISBN 3540001220.
Bekannte FEM-Programme
Unter anderem folgende kommerzielle Programmcodes sind weit verbreitet und werden zur Berechnung unterschiedlicher technischer und wissenschaftlicher Problemstellungen eingesetzt:
- ABAQUS: Universell einsetzbares FEM Programm mit einem Löser auch für hoch-nichtlineare Problemstellungen von ABAQUS Inc. (jetzt Dassault Systèmes)
- ADINA : universelles FEM-Programmsystem für Struktur, Strömung und Fluid-Struktur-Interaktion von ADINA R&D Inc. USA
- Ansys: universell einsetzbares FEM-Programm (linear, nichtlinear, kleine und große Verformungen) von Ansys Inc., USA entwickelt
- COMSOL Multiphysics: FEM-Simulationswerkzeug für beliebig gekoppelte physikalische Prozesse
- MARC: FEM-Programm von Marc Analysis Research Corporation, USA (jetzt MSC Software)
- Nastran: NASTRAN, universell einsetzbares FEM-Programm, von der NASA entwickelt
- Samcef: SAMCEF, universell einsetzbares FEM-Programm, von der LTAS (Belgien) entwickelt
- LS-DYNA: universelles FEM-Programm mit Kernkompetenz in expliziter hochgradig nichtlinearer Strukturdynamik, LSTC. Inc.
- FEAP: FEM-Programm der UC Berkeley mit frei zugänglichem Quellcode. Zielgruppen sind Anwender in der universitären Ausbildung oder in der Forschung.
Als freie Software verfügbar sind:
- CalculiX: FEM-Programmpaket mit graphischem Pre- und Postprozessor, entwickelt von Guido Dhondt und Klaus Wittig. Teilweise kompatibel zum Abaqus-Format.
- Elmer: Finite-Elemente-Programm, mit dem strukturmechanische Simulationen und numerische Strömungssimulationen berechnet werden können.
- DUNE: Bibliothek, die eine vereinheitlichte Schnittstelle für verschiedene Gitter und FEM-Programme bereitstellt. Wird vor allem in der universitären Ausbildung und Forschung benutzt.
- Z88: Ein GNU-GPL-Freeware FEM-Programm, entwickelt von Professor Frank Rieg. Es beinhaltet eine graphische Bedienoberfläche sowie mehrere leistungsstarke Solver und ist für Windows und Linux verfügbar.
Zunehmend enthalten auch kommerzielle CAD-Systeme (z. B. CATIA V5, SolidWorks, Pro/Engineer) integrierte FE-Module, mit denen einfachere (i. d. R. lineare) Problemstellungen berechnet und mithilfe des CAD-Systems anschließend direkt ausgewertet werden können. In diesen integrierten FE-Module laufen die einzelnen Schritte, z. B der Vernetzungs-Prozess (meshing), automatisch im Hintergrund ab.
Weblinks
- Geschichte der FEM
- Die Finite Elemente Methode in der Biomedizin, Biomechanik und angrenzenden Gebieten
- Eine kurze Einführung in die Finite Elemente Methode
- Numerische Methoden (Vorlesung und Praktikum, mit pdf-Skript)
Einzelnachweise
- ↑ Karl Schellbach: Probleme der Variationsrechnung. In: Journal für die reine und Angewandte Mathematik. 41, Nr. 4, 1852, S. 293-363.
- ↑ John William Strutt: On the theory of resonance. In: Philosophical Transactions of the Royal Society of London. 161, 1871, S. 77-118.
- ↑ Walter Ritz: Über eine neue Methode zur Lösung gewisser Variationsprobleme der mathematischen Physik. In: Journal für die reine und angewandte Mathematik. 135, 1909, S. 1-61.







Wikimedia Foundation.