- Dustbot
-
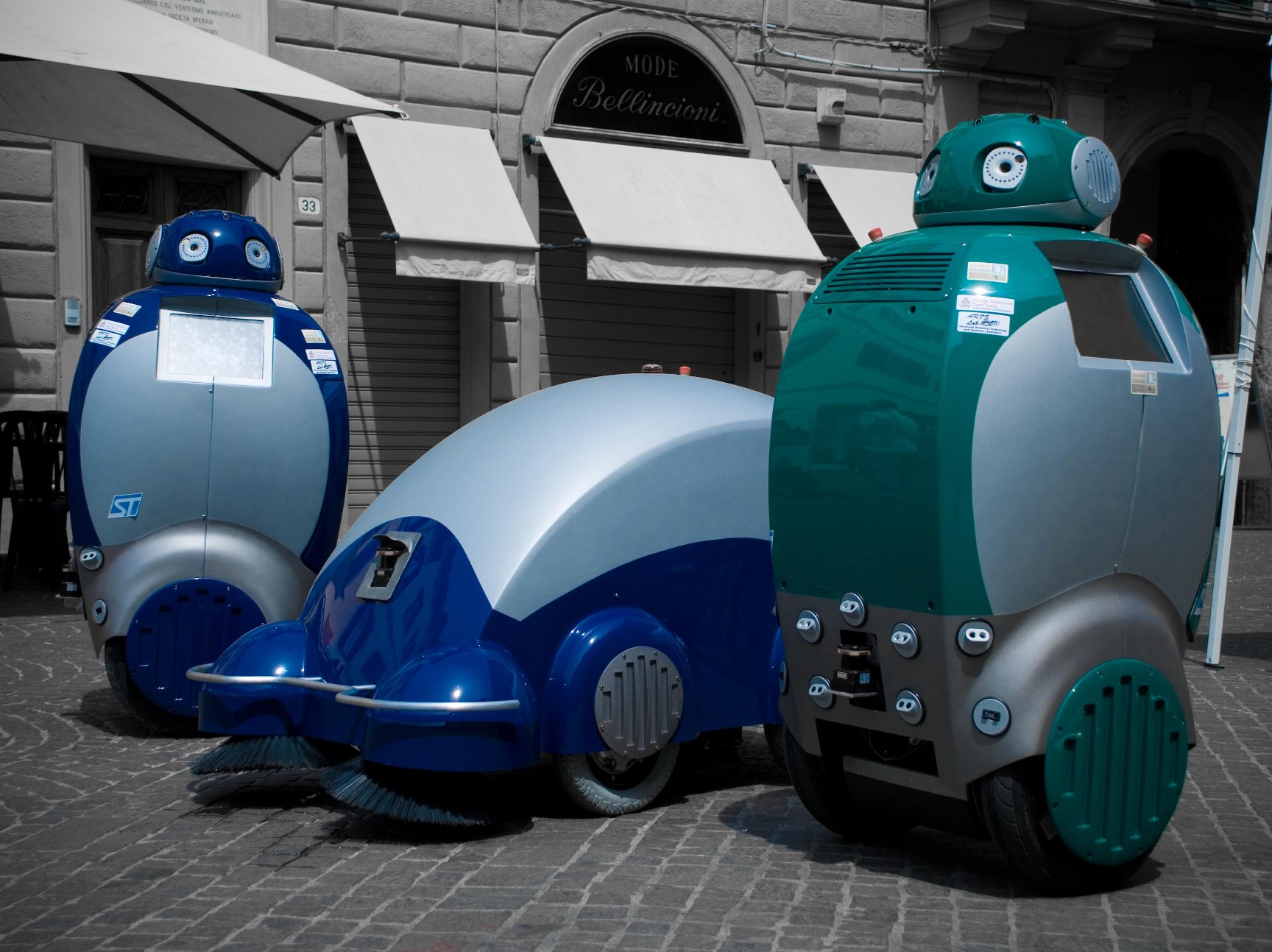
 Prototypen verschiedener Dustbots
Prototypen verschiedener Dustbots
Unter dem Begriff Dustbot (engl. Schmutzroboter) werden mehrere verschiedene in Entwicklung befindliche Roboter zusammengefasst.
Deren gemeinsames Kennzeichen ist, dass sie völlig selbstständig Müll beseitigen können. Im Rahmen eines seit Ende 2006 laufenden europäischen Forschungsprojekts fanden und finden 2009 Praxistests von Dustbots bisher in Italien und Schweden statt, was für ein weltweites Medienecho sorgte.
Ähnliche Entwicklungen und Praxiserprobungen erfolgen in Südkorea und Japan.
Inhaltsverzeichnis
Funktion und Entwicklung
Die autonomen Roboter navigieren per GPS und können mittels Anruf oder SMS jederzeit „bestellt“ werden. Die Roboter finden den Weg zum Kunden allein, sammeln den Müll und fahren ebenso unabhängig wieder zurück in ihre Zentrale oder zur Mülldeponie. Dafür muss eigens eine spezielle „Intelligente Umgebung“ geschaffen werden, ausgestattet mit Kameras und speziellen Sensoren zur Überwachung und eigenständigen Koordination der Roboter untereinander über das Internet.
Die Entwicklung der Dustbots wird an den Universitäten Örebro, Pisa, Florenz und Luzern im gleichnamigen Projekt Dustbot (Networked and Cooperating Robots for Urban Hygiene) seit Dezember 2006 vorangetrieben. Die veranschlagten Projektkosten betragen etwa 2,8 Mio. Euro für 36 Monate. Es sind neun Partner aus fünf Nationen, darunter Deutschland, Italien und Spanien, sowie mehrere Unternehmen und die Europäische Union beteiligt. Die ersten Prototypen verkehren seit Anfang 2009 in Peccioli / Italien und in Örebro / Schweden.[1]
Ziel ist die Entwicklung eines „Systems zur Verbesserung der städtischen Hygiene“ besonders in den alten, eng bebauten europäischen Städten.
Technik
 Detailansicht eines Dustbots
Detailansicht eines DustbotsDie Roboter verfügen neben GPS auch über gespeicherte Straßenkarten ihres Einsatzgebietes. Sie sind in der Lage, drahtlose Kommunikation zu nutzen. Um Hindernissen ausweichen zu können, sind Ultraschall- und Infrarotsensoren eingebaut. Außerdem verfügen die Dustbots über Schadstoffsensoren, mit denen sie die Luftverschmutzung messen können. Ihr Fassungsvermögen beträgt 40 kg.
Der Dustcart Robot wird das Segway-System als Plattform nutzen, mit dem er bis zu 15 km/h schnell sein wird. Die Reichweite liegt bei 19–24 Kilometer bei einer Laufzeit von etwa sechs Stunden. Das Leergewicht beträgt 64 kg. Der Dustcart Robot wird über ein Benutzerinterface verfügen, damit der Kunde Menge und Art des Abfalls, mit dem der Dustbot beladen wurde, angeben kann.
Typen
Es gibt zwei Typen der Dustrobots. Dustclean verkehrt als Saug- und Kehrroboter über die Straßen und hält diese sauber. Die andere Version, Dustcart Robot genannt, dient als eine Art Müllcontainer, der per Anruf oder SMS bestellt werden kann und anschließend mit Abfällen beladen wird.
Einzelnachweise
- ↑ Vgl. Medienberichte über die Praxistests in Peccioli, Italien, wie beispielsweise bei: www.trendsderzukunft.de, www.switched.com, Spiegel-Online; sowie in Örebro in Schweden, wie beispielsweise bei: www.20min.ch, www.dn.se, www.krone.at (jeweils aufgerufen am 13. Juli 2009).
Weblinks
- Offizielle Internetpräsenz – Project Dustbot (Networked and Cooperating Robots for Urban Hygiene) (englisch)
- Online-Artikel: Roboter 'DustBot' im Reallife- Test auf www.telekom-presse.at vom 4. Februar 2009
- Online-Artikel: Dustbot - Roboter räumen auf auf Golem.de vom 25. Mai 2009
- TV-Bericht: Dustbot the street cleaning robot bei BBC News vom 29. Mai 2009 (Text und Video; englisch)

Wikimedia Foundation.