- Drei-Phasen-Verkehrstheorie
-
Die Drei-Phasen-Verkehrstheorie ist eine alternative Verkehrstheorie begründet von Boris Kerner in den Jahren 1996–2002[1][2][3]. Sie erklärt den Verkehrszusammenbruch und den resultierenden gestauten Verkehr auf Schnellstraßen. Kerner beschreibt drei Phasen des Verkehrs, wohingegen die klassischen Theorien auf Basis des Fundamentaldiagramms des Verkehrsflusses zwei Phasen umfassen: freier Verkehr und gestauter Verkehr. Der gestaute Verkehr wird von Kerner in zwei Phasen, Synchronisierter Verkehr und Sich bewegender breiter Stau, eingeteilt, woraus sich dann insgesamt drei Phasen ergeben:


Synchronisierter Verkehr - Freier Verkehr (F)
- Synchronisierter Verkehr (S)
- Sich bewegender breiter Stau (J)
Eine Phase wird dabei als ein Zustand in Raum und Zeit definiert.
Freier Verkehr (F)
 Bild 1:Datenmessungen von Verkehrsfluss im Verhältnis zur Verkehrsdichte bei freiem Verkehr
Bild 1:Datenmessungen von Verkehrsfluss im Verhältnis zur Verkehrsdichte bei freiem VerkehrIm freien Verkehr können die Fahrer ihre Geschwindigkeit überwiegend frei wählen. Empirische Daten zeigen einen positiven Zusammenhang zwischen dem Verkehrsfluss q (in Fahrzeugen pro Zeiteinheit) und der Verkehrsdichte k (in Fahrzeugen pro Längeneinheit). Diese Beziehung wird durch einen maximalen Punkt des freien Verkehrs bei einem maximalen Fluss qmax mit einer entsprechenden kritischen Dichte begrenzt kcrit (Bild 1).
Gestauter Verkehr
 Bild 2: Datenmessungen von Verkehrsfluss im Verhältnis zur Verkehrsdichte im freien und gestauten Verkehr
Bild 2: Datenmessungen von Verkehrsfluss im Verhältnis zur Verkehrsdichte im freien und gestauten VerkehrIm gestauten Verkehr ist die Fahrzeugsgeschwindigkeit niedriger als die minimale mögliche Fahrzeugsgeschwindigkeit
 des freien Verkehrs. Somit teilt die Linie mit der Steigung
des freien Verkehrs. Somit teilt die Linie mit der Steigung  , die der minimalen Fahrzeugsgeschwindigkeit des freien Verkehrs entspricht (punktierte Linie im Bild 2), alle empirischen Daten auf der Fluss-Dichte-Ebene in zwei Bereiche: Links liegende Daten entsprechen dem freien Verkehr, rechts liegende Daten entsprechen dem gestauten (Englisch: congested) Verkehr.
, die der minimalen Fahrzeugsgeschwindigkeit des freien Verkehrs entspricht (punktierte Linie im Bild 2), alle empirischen Daten auf der Fluss-Dichte-Ebene in zwei Bereiche: Links liegende Daten entsprechen dem freien Verkehr, rechts liegende Daten entsprechen dem gestauten (Englisch: congested) Verkehr.Definitionen der Phasen J und S in gestautem Verkehr
Die Phasendefinitionen [J] und [S] in gestautem Verkehr sind das Ergebnis der allgemeingültigen empirischen zeitlich-räumlichen Eigenschaften der Verkehrsdaten.
Allgemeingültige zeitlich-räumliche Eigenschaften von Verkehrsstörungen
Allgemeingültige zeitlich-räumliche Eigenschaften von Verkehrsstörungen sind diejenigen, die auf Basis von langjährigen Messungen auf verschiedenen Autobahnen in verschiedenen Ländern als gleichartig erkannt wurden. Insbesondere sind diese Eigenschaften unabhängig vom Wetter, Straßenzuständen und Straßeninfrastrukturbedingungen, Fahrzeugtechnik, Fahrereigenschaften, Tageszeiten etc..
Die Kerner’schen Definitionen [S] und [J] für die Phasen des synchronisierten Verkehrs (im weiteren durch „S“ gekennzeichnet) und des sich bewegenden breiten Staus (im weiteren durch „J“ gekennzeichnet; englisch: „wide moving jam“) [1][2][3] sind Beispiele für diese allgemeingültigen zeitlich-räumlichen Eigenschaften von Verkehrsstörungen.
Fortbewegung sich bewegender breiter Staus durch Engstellen von Schnellstraßen
In empirischen Beobachtungen entsteht eine Verkehrsstörung normalerweise an einer Engstelle einer Schnellstraße als Ergebnis eines Verkehrszusammenbruchs in einem anfänglich freien Verkehr. Eine solche Engstelle kann durch Zu- und Abfahrten, kurvige Strecken, Steigungen, Baustellen, etc. verursacht werden.
In gestautem Verkehr (wird im Folgenden als ein Synonym für Verkehrsstörung verwendet) wird das Phänomen eines sich fortbewegenden breiten Staus (kürzer: sich bewegender Stau) häufig beobachtet. Ein solcher sich bewegender Stau ist ein räumliches Gebiet geringer Geschwindigkeit und hoher Verkehrsdichte, welches sich gegen die Fahrtrichtung fortbewegt. Das Staugebiet wird durch zwei Staufronten begrenzt: an der in Fahrtrichtung stromabwärtigen beschleunigen die Fahrzeuge wieder und bei der stromaufwärtigen verzögern diese während sie sich dem Staubereich nähern.
Ein sich bewegender breiter Stau ist ein Stau mit der charakteristischen Eigenschaft der Phase J, die eine der allgemeingültigen Eigenschaften von Verkehrsstaus ist.
Definition [J] für die Verkehrsphase „sich bewegender breiter Stau“
Die Kerner’sche Definition [J] der Phase J ist wie folgt: Ein sich bewegender breiter Stau bewegt sich durch alle Engstellen hindurch. Dabei wird die mittlere Geschwindigkeit der stromabwärtigen Staufront (mit vg gekennzeichnet) beibehalten.
Diese Kerner’sche Staueigenschaft von [J] erklärt sich wie folgt: die Fortbewegung der stromabwärtigen Front eines sich bewegenden breiten Staus entsteht durch die Beschleunigung der Fahrer aus dem Stillstand im Stau. Nachdem ein Fahrzeug mit dieser Beschleunigung begonnen hat, folgt ein nächstes Fahrzeug unter Einhaltung eines Sicherheitsabstands mit einer zeitlichen Verzögerung. Wir bezeichnen den Mittelwert dieser Zeitverzögerung mit
 . Da der durchschnittliche Abstand zwischen Fahrzeugen im Stau einschließlich der mittleren Fahrzeuglänge gleich
. Da der durchschnittliche Abstand zwischen Fahrzeugen im Stau einschließlich der mittleren Fahrzeuglänge gleich  ist (mit ρmax als durchschnittlicher Fahrzeugdichte in einem Stau) ergibt sich für die mittlere Geschwindigkeit der stromabwärtigen Staufront vg
ist (mit ρmax als durchschnittlicher Fahrzeugdichte in einem Stau) ergibt sich für die mittlere Geschwindigkeit der stromabwärtigen Staufront vg .
.Wenn sich die Parameter des Verkehrs wie Anteil der LKW, Wetter, Fahrereigenschaften, etc. im Zeitverlauf nicht verändern, sind die Werte
and ρmax zeitlich konstant. Das erklärt, warum diese mittlere Frontgeschwindigkeit vg ein charakteristischer Wert ist, der nicht von den Verkehrsflüssen und Verkehrsdichten vor und nach dem Stau abhängt."Catch effect": Einfangen der stromabwärtigen Front eines synchronisierten Verkehrs an einer Engstelle
Im Gegensatz zu den Eigenschaften von [J] bleibt die mittlere Geschwindigkeit der stromabwärtigen Front des synchronisierten Verkehrs während ihrer Fortbewegung nicht erhalten: das ist eine allgemeingültige Eigenschaft des synchronisierten Verkehrs.. Ein besonderer Fall dieser charakteristischen Eigenschaft für den synchronisierten Verkehr ist, dass die stromabwärtige Front an einer Engstelle festgehalten wird. Dieses Festhalten der Front an einer Engstelle wurde als catch effect bezeichnet. An der stromabwärtigen Front beschleunigen die Fahrzeuge aus einer niedrigeren Geschwindigkeit zu einer höheren.
Definition [S] für die Verkehrsphase „synchronisierter Verkehr“
Definition [S] für die Phase S: Synchronisierter Verkehr ist definiert als ein gestauter Verkehr ohne die charakteristische Eigenschaft von [J] aufzuweisen; insbesondere ist die stromabwärtige Front des synchronisierten Verkehrs häufig ortsfest an einer Engstelle fixiert.
Die Kerner’schen Definitionen [J] und [S] der Phasen sich bewegenden breiten Stau und synchronisierten Verkehr innerhalb der Drei-Phasen-Verkehrstheorie[1][2][3] sind die allgemeingültigen Eigenschaften von Verkehrsstörungen im Straßenverkehr.
Erklärung der Phasendefinitionen [J] und [S] mit empirischen Messdaten
Die Definitionen [J] und [S] werden durch reale Messdaten für die mittlere Fahrzeugsgeschwindigkeit (Bild 3 (a)) illustriert. Es gibt zwei unterschiedlichen zeitlich-räumlichen Strukturen des gestauten Verkehrs mit niedrigen Fahrzeugsgeschwindigkeiten in Bild 3 (a). Eine Struktur des gestauten Verkehrs propagiert stromaufwärts mit nahezu konstanter Geschwindigkeit der stromabwärtigen Front durch die Engstelle auf der Schnellstraße. Entsprechend der Definition [J] gehört diese Struktur des gestauten Verkehrs zur Verkehrsphase „sich bewegender breiter Stau“. Dagegen ist die stromabwärtige Front der anderen Struktur des gestauten Verkehrs an der Engstelle fixiert. Entsprechend der Definition [S] gehört diese Struktur des gestauten Verkehrs zur Verkehrsphase „synchronisierter Verkehr“ (Bilder 3 (a) und (b)).
 Bild 3: Allgemeingültige zeitlich-räumliche Eigenschaften von Verkehrsstörungen und ihre Verknüpfung mit Kerner’s Drei-Phasen-Verkehrstheorie. Messdaten der Geschwindigkeiten in Zeit und Raum (a) und deren Darstellung in der Zeit-Raum Ebene (b)
Bild 3: Allgemeingültige zeitlich-räumliche Eigenschaften von Verkehrsstörungen und ihre Verknüpfung mit Kerner’s Drei-Phasen-Verkehrstheorie. Messdaten der Geschwindigkeiten in Zeit und Raum (a) und deren Darstellung in der Zeit-Raum Ebene (b)Die fundamentale Hypothese der Kerner’schen Drei-Phasen-Verkehrstheorie
Hypothetische homogene Zustände des synchronisierten Verkehrs
Die fundamentale Hypothese der Kerner’schen Drei-Phasen-Verkehrstheorie ist verbunden mit Zuständen des homogenen synchronisierten Verkehrs (in weiterem als homogener synchronisierter Verkehr genannt; English: “a steady state of synchronized flow”). Ein solcher homogener synchronisierter Verkehrs ist ein hypothetischer Zustand des synchronisierten Verkehrs von gleichen Fahrzeugen und Fahrern, in dem sich alle Fahrzeuge mit der gleichen zeitunabhängigen Geschwindigkeit und gleichen Abständen (der Abstand ist die der Netto-Abstand zwischen zwei aufeinanderfolgenden Fahrzeugen) bewegen, das bedeutet, dieser synchronisierte Verkehr ist homogen in Zeit und Raum.
Unendliche Zahl der Fahrzeugabstände bei einer gegebenen Geschwindigkeit
Die fundamentale Hypothese lautet wie folgt: Zustände des homogenen synchronisierten Verkehrs überdecken eine zweidimensionale Fläche in der Fluss-Dichte-Ebene (2D-Region S in Abb. 4(a)). Die Menge der möglichen Zustände freien Verkehrs überlappt dabei die Menge der Zustände des homogenen synchronisierten Verkehrs bei einer gegebenen Verkehrsdichte. Die Zustände des freien Verkehrs auf einer mehrspurigen Schnellstraße und die Zustände des homogenen synchronisierten Verkehrs sind getrennt durch eine Lücke im Verkehrsfluss, und, demzufolge, durch eine Lücke in der Geschwindigkeit bei einer gegebenen Verkehrsdichte: bei jeder einzelnen Verkehrsdichte ist die Geschwindigkeit im synchronisierten homogenen Verkehr geringer als im freien Verkehr
In Übereinstimmung mit der fundamentalen Hypothese der Kerner’schen Drei-Phasen-Verkehrstheorie kann ein Fahrer bei einer gegebenen Geschwindigkeit im homogenen synchronisierten Verkehr eine beliebige Wahl des Abstands zum Vordermann treffen. Dies ist innerhalb einer gewissen Bandbreite von Abständen entsprechend der zweidimensionalen Fläche der Zustände des homogenen synchronisierten Verkehrs möglich (Abb. 4(b)): ein Fahrer akzeptiert zu verschiedenen Zeiten verschiedene Abstände und steuert nicht auf einen festen Abstand zum vorausfahrenden Fahrzeug hin.
 Bild 4: Fundamentale Hypothese der Kerner’schen Drei-Phasen-Verkehrstheorie: (a) Qualitative Darstellung von Zuständen des freien Verkehrs (F) und der zweidimensionalen Fläche der Zustände des homogenen synchronisierten Verkehrs (gestricheltes Gebiet S) auf einer mehrspurigen Schnellstraße in der Fluss-Dichte-Ebene. (b) Teil der zweidimensionalen Fläche der Zustände des homogenen synchronisierten Verkehrs aus (a) in der Abstandslücke-Geschwindigkeits-Ebene (gestricheltes Gebiet S). In (b) ist G der Synchronisationsabstand des Verkehrs und gsafe ist der Sicherheitsabstands zweier aufeinander folgender Fahrzeuge.
Bild 4: Fundamentale Hypothese der Kerner’schen Drei-Phasen-Verkehrstheorie: (a) Qualitative Darstellung von Zuständen des freien Verkehrs (F) und der zweidimensionalen Fläche der Zustände des homogenen synchronisierten Verkehrs (gestricheltes Gebiet S) auf einer mehrspurigen Schnellstraße in der Fluss-Dichte-Ebene. (b) Teil der zweidimensionalen Fläche der Zustände des homogenen synchronisierten Verkehrs aus (a) in der Abstandslücke-Geschwindigkeits-Ebene (gestricheltes Gebiet S). In (b) ist G der Synchronisationsabstand des Verkehrs und gsafe ist der Sicherheitsabstands zweier aufeinander folgender Fahrzeuge.Die fundamentale Hypothese der Kerner’schen Drei-Phasen-Verkehrstheorie steht im Widerspruch zu vorherigen Verkehrsflusstheorien über das Fundamentaldiagramm des Verkehrs, welches eine eindimensionale Beziehung zwischen Verkehrsdichte und Verkehrsfluss kennt.
Fahrzeugfolge in der Drei-Phasen-Verkehrstheorie
In der Kerner’schen Drei-Phasen-Verkehrstheorie beschleunigt ein Fahrzeug zum vorausfahrenden Fahrzeug, wenn der Abstand g größer als ein Synchronisationsabstand G ist, d.h. bei g > G (beschrieben als Fahrzeugbeschleunigung in Abb. 5). Das Fahrzeug verzögert, wenn sein Abstand g kleiner als ein Sicherheitsabstand gsafe ist, d.h. bei g < gsafe (beschrieben als Fahrzeugverzögerung in Abb. 5)
 Bild 5: Qualitative Darstellung der Fahrzeugfolge in Kerner’scher Drei-Phasen-Verkehrstheorie: ein Fahrzeug beschleunigt bei Abständen g > G und verzögert bei g < gsafe, während unter der Bedingung
Bild 5: Qualitative Darstellung der Fahrzeugfolge in Kerner’scher Drei-Phasen-Verkehrstheorie: ein Fahrzeug beschleunigt bei Abständen g > G und verzögert bei g < gsafe, während unter der Bedingung das Fahrzeug seine Geschwindigkeit an die des vorausfahrenden Fahrzeugs anpasst ohne auf den exakten räumlichen Abstand zu achten. Das gestrichelte Gebiet des synchronisierten Verkehrs ist von Abb. 4(b) übernommen.
das Fahrzeug seine Geschwindigkeit an die des vorausfahrenden Fahrzeugs anpasst ohne auf den exakten räumlichen Abstand zu achten. Das gestrichelte Gebiet des synchronisierten Verkehrs ist von Abb. 4(b) übernommen.Ein geringerer Abstand als der Synchronisationsabstand G entspricht einem Abstand g zwischen zwei Fahrzeugen, innerhalb dessen ein Fahrzeug sich der Geschwindigkeit des vorausfahrenden Fahrzeugs anpasst ohne auf den exakten Abstand zu achten. Das gilt solange, bis dieser Abstand nicht kleiner als ein Sicherheitsabstand gsafe wird (beschrieben als Geschwindigkeitsanpassung in Abb. 5). Mit anderen Worten, das Fahrzeugfolgeverhalten in der Kerner’schen Drei-Phasen-Verkehrstheorie kann jeder Abstand im Bereich
sein.Verkehrszusammenbruch - ein F→S-Phasenübergang
In Messdaten entsteht der gestaute Verkehr meist an einer Engstelle der Schnellstraße, wie beispielsweise einer Zufahrt, einer Abfahrt oder einer Baustelle. Ein solcher Übergang vom freien zum gestauten Verkehr ist als Verkehrszusammenbruch (d.h. Zusammenbruch des Verkehrs) bekannt. In Kerner’scher Drei-Phasen-Verkehrstheorie wird ein Verkehrszusammenbruch durch einen F→S-Phasenübergang erklärt. Diese Erklärung wird durch verfügbare Messdaten bestätigt, da in Messungen des Verkehrs nach einem Verkehrszusammenbruch an einer Engstelle die stromabwärtige Flanke des gestauten Verkehrs an der Engstelle fixiert wird. Deshalb entspricht der bei einem Verkehrszusammenbruch entstehende gestaute Verkehr der Definition [S] für die Verkehrsphase „synchronisierter Verkehr“.
Spontane und induzierte F→S-Phasenübergänge
Kerner stellt unter der Verwendung von empirisch gemessenen Daten fest, dass synchronisierter Verkehr sich in freiem Verkehr spontan (spontaner F→S-Phasenübergang) oder von außen induziert (induzierter F→S-Phasenübergang) bilden kann. Ein spontaner F→S-Phasenübergang bedeutet, dass ein Verkehrszusammenbruch auftritt, wenn vorher freier Verkehr sowohl an der Engstelle als auch stromab- und stromaufwärts der Engstelle existierte. Dies bedeutet, dass ein spontaner F→S-Phasenübergang durch das Wachstum einer eigenen Störung im freien Verkehr auftritt. Dagegen wird ein induzierter Zusammenbruch durch Störungen im Verkehrsfluss an einem anderen Ort verursacht. Dies steht normalerweise im Zusammenhang mit einer stromaufwärtigen Fortpflanzung eines Gebietes des synchronisierten Verkehrs oder eines sich bewegenden breiten Staus. Ein empirisches Beispiel des induzierten Verkehrszusammenbruchs an einer Engstelle, der zum synchronisierten Verkehr führt, ist auf Bild 3 zu sehen: durch die Bewegung eines sich bewegenden breiten Staus durch die Engstelle entsteht synchronisierter Verkehr.
Erklärung des Verkehrszusammenbruches
 Bild 6: Zur Erklärung des Verkehrszusammenbruches durch eine sprungartige Funktion der Überholwahrscheinlichkeit in der Kerner’schen Drei-Phasen-Verkehrstheorie. Die gestrichelte Kurve zeigt die kritische Überholwahrscheinlichkeit als Funktion der Verkehrsdichte.
Bild 6: Zur Erklärung des Verkehrszusammenbruches durch eine sprungartige Funktion der Überholwahrscheinlichkeit in der Kerner’schen Drei-Phasen-Verkehrstheorie. Die gestrichelte Kurve zeigt die kritische Überholwahrscheinlichkeit als Funktion der Verkehrsdichte.Kerner erklärt die Natur des F→S-Phasenübergangs durch eine zeitlich-räumliche Konkurrenz der Fahrzeugbeschleunigung durch das Überholen eines langsameren Vordermanns und der Fahrzeugverzögerung zur Geschwindigkeit des langsameren Vordermanns („Geschwindigkeitsanpassung“). Ein Überholvorgang des langsameren Vordermanns fördert den Erhalt des freien Verkehrs. Dagegen führt die „Geschwindigkeitsanpassung“ zum synchronisierten Verkehr. Eine solche Geschwindigkeitsanpassung findet statt, falls ein Überholvorgang nicht möglich ist. Kerner nimmt an, dass die Abhängigkeit der Überholwahrscheinlichkeit eine unterbrochene Dichtefunktion ist (Bild 6): bei einer gegebenen Fahrzeugdichte ist die Überholwahrscheinlichkeit im freien Verkehr wesentlich größer als die im synchronisierten Verkehr.
Unendliche Zahl der Straßenkapazitäten
Maximale und minimale Straßenkapazitäten
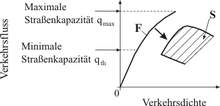 Bild 7: Maximale und minimale Straßenkapazitäten in Kerner’scher Drei-Phasen-Verkehrstheorie
Bild 7: Maximale und minimale Straßenkapazitäten in Kerner’scher Drei-Phasen-VerkehrstheorieDer spontane Verkehrszusammenbruch, d.h. ein spontaner F→S-Phasenübergang, kann in einem breiten Wertebereich von Verkehrsflüssen im freien Verkehr auftreten. Kerner stellt unter der Verwendung von empirisch gemessenen Daten fest, dass wegen der Möglichkeit eines spontanen oder induzierten Verkehrszusammenbruchs an der gleichen Engstelle einer Straße eine unendliche Zahl von Straßenkapazitäten existiert. Diese unendlich vielen Straßenkapazitäten liegen zwischen einer minimalen Straßenkapazität qth und einer maximalen Straßenkapazität qmax des freien Verkehrs (Bild 7).
Straßenkapazitäten und Metastabilität des freien Verkehrs
Schon kleine Störungen im freien Verkehr an einer Engstelle führen zum spontanen F→S-Phasenübergang, falls der Verkehrsfluss im freien Verkehr sich der maximalen Straßenkapazität qmax nähert. Demgegenüber könnten bei einem Verkehrsfluss, der gleich der minimalen Straßenkapazität qth ist, nur sehr große Störungen im freien Verkehr an einer Engstelle zum spontanen F→S-Phasenübergang führen. Die Wahrscheinlichkeit einer kleinen Störung im freien Verkehr ist jedoch viel größer als die einer größeren Störung. Deshalb gilt, dass je größer der Verkehrsfluss im freien Verkehr an der Engstelle ist, desto größer ist auch die Wahrscheinlichkeit des spontanen F→S-Phasenüberganges. Falls der Verkehrsfluss im freien Verkehr kleiner als die minimale Straßenkapazität qth ist, kann kein Verkehrszusammenbruch (F→S-Phasenübergang) an der Engstelle stattfinden, d.h. der freie Verkehr ist stabil.
Die unendliche Zahl der Straßenkapazitäten kann auch durch die Metastabilität des freien Verkehrs bei den Verkehrsflüssen im Bereich

verdeutlicht werden. Metastabilität des freien Verkehrs bedeutet, dass bei kleinen auftretenden Störungen der Verkehrszustand immer noch stabil sein kann (freier Verkehr bleibt bestehen), aber bei größeren Störungen der freie Verkehr instabil wird und dann ein F→S-Phasenübergang zum synchronisierten Verkehr stattfindet.
Diskussion der Definitionen der Straßenkapazität
Die unendliche Zahl der Straßenkapazitäten der Kerner’schen Drei-Phasen-Verkehrstheorie widerspricht fundamental den klassischen Verkehrstheorien und -methoden für Verkehrsmanagement und Verkehrssteuerung, in denen zu jeder Zeit die Existenz einer bestimmten Straßenkapazität angenommen wird. Im Gegensatz dazu gibt es in der Kerner’schen Drei-Phasen-Verkehrstheorie zu jeder Zeit eine unendliche Zahl von Straßenkapazitäten, die sich innerhalb des oben erwähnten Bereichs zwischen der minimalen Straßenkapazität qth und der maximalen Straßenkapazität qmax befinden. Die Werte qth und qmax können beträchtlich von verschiedenen Verkehrsparametern abhängen (prozentualer Anteil der LKWs, Wetter, Eigenschaften der effektiven Engstelle, usw.).
Sich bewegende breite Staus (J)
Ein sich bewegender Stau wird „breit“ genannt, wenn die Breite des sich bewegenden Staus (in Fahrtrichtung der Schnellstraße) die Breite der Staufronten deutlich übersteigt. Die mittlere Geschwindigkeit der Fahrzeuge innerhalb des sich bewegenden breiten Staus ist dabei deutlich geringer als die mittlere Geschwindigkeit im freien Verkehr. An der stromabwärtigen Staufront beschleunigen die Fahrzeuge wieder zu der im freien Verkehr möglichen Geschwindigkeit. An der stromaufwärtigen Front kommen die Fahrzeuge aus dem freien Verkehr und müssen ihre Geschwindigkeit verringern. Entsprechend der Definition [J] behält ein sich bewegender breiter Stau die mittlere Geschwindigkeit der stromabwärtigen Staufront vg bei, sogar wenn der Stau sich durch andere Verkehrsphasen oder Engstellen fortbewegt. Der Verkehrsfluss (Anzahl der Fahrzeuge je Zeiteinheit) ist innerhalb eines sich bewegenden breiten Staus sehr stark reduziert.
Charakteristische Eigenschaften sich bewegender breiter Staus
 Bild 8: Drei Verkehrsphasen in der Fluss-Dichte Ebene in Kerner’scher Drei-Phasen-Verkehrstheorie
Bild 8: Drei Verkehrsphasen in der Fluss-Dichte Ebene in Kerner’scher Drei-Phasen-VerkehrstheorieKerners empirische Resultate zeigen, dass einige charakteristische Eigenschaften von sich bewegenden breiten Staus vom Verkehrsaufkommen und den Eigenschaften einer Engstelle, wie etwa wo und wann ein Stau entstanden ist, unabhängig sind. Jedoch können diese charakteristischen Eigenschaften von den Wetterbedingungen, Straßenverhältnissen, usw. stark abhängen. Die Geschwindigkeit der stromabwärtigen Staufront eines sich bewegenden breiten Staus vg (in stromaufwärtiger Richtung) ist ein typischer Parameter, genauso wie der Verkehrsfluss stromabwärts von der stromabwärtigen Staufront qout (bei freiem Verkehr an dieser Stelle, siehe Bild 8). Das bedeutet, dass mehrere sich bewegende breite Staus unter ähnlichen Bedingungen ähnliche Eigenschaften aufweisen. Diese Parameter sind aus diesen Gründen in einem gewissen Maße vorhersagbar. Die Bewegung der stromabwärtigen Staufront kann in der Fluss-Dichte Ebene durch eine Linie, die die Linie J genannt wird, dargestellt werden (Linie J in Bild 8). Die Steigung der Linie J ist gleich der Geschwindigkeit der stromabwärtigen Staufront vg, weil die Koordinate der Linie J beim Verkehrsfluss null der Verkehrsdichte im Stau kmax entspricht.
Minimale Straßenkapazität und Stauabfluss
Kerner betont, dass die minimale Straßenkapazität qth und der Abfluss aus einem sich bewegenden breiten Stau qout zwei qualitativ verschiedenen charakteristischen Eigenschaften des freien Verkehrs entsprechen: die minimale Straßenkapazität qth ist eine Charakteristik des F→S-Phasenübergangs an einer Engstelle (d. h., des Verkehrszusammenbruchs). Dagegen charakterisiert der Abfluss aus einem sich bewegenden breiten Stau qout die Bedingungen der Existenz und der Entstehung des Staus, d.h. der Verkehrsphase J. In Abhängigkeit von Verkehrsparametern (wie Wetter, Anteil der Lastkraftwagen im Verkehrsfluss, usw.) und von Charakteristiken der Engstelle, an der der F→S-Phasenübergang stattfindet, kann die minimale Straßenkapazität qth entweder kleiner als der Stauabfluss qout (wie in Bild. 8 dargestellt wurde), oder auch größer als qout sein.
Synchronisierter Verkehr (S)
Im Gegensatz zu sich bewegenden Staus können sowohl der Verkehrsfluss als auch die Geschwindigkeiten der Fahrzeuge innerhalb der Verkehrsphase des synchronisierten Verkehrs beträchtlich variieren. Die stromabwärtige Front des synchronisierten Verkehrs ist oftmals an einer Stelle fixiert (siehe Definition [S]), für gewöhnlich an einer Engstelle an einer bestimmten Straßenposition. Der Verkehrsfluss in dieser Phase kann immer noch vergleichbar zum freien Verkehr sein, obwohl die Geschwindigkeiten der Fahrzeuge stark reduziert sind.
Da im Gegensatz zu sich bewegenden breiten Staus der synchronisierte Verkehr die charakteristische Staueigenschaft der Phase [J] nicht aufweist, wird in Kerner’scher Drei-Phasen-Verkehrstheorie angenommen, dass hypothetische homogene Zustände des synchronisierten Verkehrs eine zweidimensionale Fläche in der Fluss-Dichte-Ebene bilden (gestrichelte Flächen in Bild 8).
S→J-Phasenübergang
Sich bewegende breite Staus entstehen nicht spontan im freien Verkehr, sondern sie können sich nur in Gebieten des synchronisierten Verkehrs spontan bilden. Dieser Phasenübergang wird S→J-Phasenübergang genannt.
„Stau aus dem Nichts“ - F→S→J-Phasenübergänge
Deshalb beobachtet man die Entstehung von sich bewegenden breiten Staus in freiem Verkehr („Stau aus dem Nichts“) als eine Folge von F→S→J-Phasenübergängen: zuerst entsteht synchronisierter Verkehr in einem Gebiet des freien Verkehrs. Wie oben erklärt wurde, tritt ein solcher F→S-Phasenübergang meistens an einer Engstelle der Straße auf. Darin findet eine Eigenkompression dieses synchronisierten Verkehrs statt, die Verkehrsdichte wird dabei höher, die Geschwindigkeit nimmt weiter ab. Diese Eigenkompression wird „pinch effect“ genannt. In diesen Pinch-Gebieten des synchronisierten Verkehrs bilden sich bewegende enge Staus. Wenn diese sich bewegenden engen Staus wachsen, entwickeln sie sich zu sich bewegenden breiten Staus. Kerner stellt fest, dass die Frequenz des Auftretens von sich bewegenden breiten Staus umso höher ist, je höher die Dichte im synchronisierten Verkehr ist. Diese sich bewegenden breiten Staus bewegen sich stromaufwärts und pflanzen sich weiter fort, sogar wenn sie sich durch Gebiete des synchronisierten Verkehrs oder andere Engstellen fortbewegen.
Physik des S→J-Phasenübergangs
Um den S→J-Phasenübergang zu verdeutlichen, sollte man bemerken, dass in Kerner’scher Drei-Phasen-Verkehrstheorie die Linie J alle homogenen Zustände des synchronisierten Verkehrs in zwei Bereiche unterteilt (Bild 8). Zustände des homogenen synchronisierten Verkehrs, die oberhalb der Linie J liegen, sind metastabil. Dagegen sind Zustände des homogenen synchronisierten Verkehrs, die unterhalb der Linie J liegen, stabil. Metastabiler homogener synchronisierter Verkehr bedeutet, dass bei kleinen auftretenden Störungen der Verkehrszustand immer noch stabil ist, aber bei größeren Störungen der synchronisierte Verkehr instabil wird und ein S→J-Phasenübergang zu einem sich bewegenden breiten Stau stattfinden kann.
Verkehrsmuster aus S und J
Durch F→S- und S→J-Phasenübergänge werden in Messungen des Verkehrs sehr komplexe zeitlich-räumliche Verkehrsmuster beobachtet.
Klassifikation der Verkehrsmuster aus S
Ein Muster des synchronisierten Verkehrs (Synchronized Flow Pattern (SP)), mit einer fixierten stromabwärtigen und nicht kontinuierlich propagierenden stromaufwärtigen Front, wird lokaler synchronisierter Verkehr genannt (Localised Synchronized Flow (LSP)).
Es ist jedoch häufig zu beobachten, dass sich die stromaufwärtige Front eines SP stromaufwärts bewegt. Wenn sich nur die stromaufwärtige Staufront stromaufwärts bewegt, dann wird dieses SP ein sich verbreiterndes Muster des synchronisierten Verkehrs (Widening Synchronized Flow Pattern (WSP)) genannt. Die stromabwärtige Front verbleibt an der effektiven Engstelle und die Ausdehnung des SP wächst an.
Es ist sogar möglich, dass sich sowohl die stromaufwärtige als auch die stromabwärtige Front stromaufwärts bewegen. Die stromabwärtige Front ist dann nicht mehr an der effektiven Engstelle fixiert. Diese Muster werden sich bewegende Muster des synchronisierten Verkehrs genannt (Moving Synchronized Flow Pattern (MSP)).
„Einfangen“ der Verkehrsmuster aus S an einer Engstelle
Der Unterschied zwischen einem SP und einem sich bewegenden breiten Stau ist jedoch, dass wenn ein WSP oder MSP eine stromaufwärtige Engstelle erreicht, dort der sogenannte „catch effect“ auftreten kann. Das SP wird an der Engstelle eingefangen und als Ergebnis bildet sich ein neues Muster an dieser Engstelle. Ein sich bewegender breiter Stau dagegen wird nicht an einer Engstelle eingefangen und bewegt sich immer weiter durch die Engstelle stromaufwärts. Im Gegensatz zu sich bewegenden breiten Staus weist synchronisierter Verkehr, sogar wenn er sich als ein MSP bewegt, keine charakteristischen Parameter auf. Zum Beispiel kann die Geschwindigkeit der stromabwärtigen Front eines MSP über einen weiten Bereich variieren und für verschiedene MSP unterschiedlich sein. Diese Eigenschaften der SP und sich bewegenden breiten Staus sind eine Folge der Verkehrsphasendefinitionen [S] und [J].
Allgemeines Staumuster - Verkehrsmuster aus S und J
Ein sehr oft festzustellendes Muster beinhaltet beide Phasen des gestauten Verkehrs, sowohl [S] als auch [J]. Ein solches Verkehrsmuster, das aus beiden Verkehrsphasen [S] und [J] des gestauten Verkehrs besteht, wird Allgemeines Staumuster (General Pattern (GP)) genannt.
 Bild 9: Gemessenes Verkehrsmuster EGP an drei Engstellen B1, B2 und B3
Bild 9: Gemessenes Verkehrsmuster EGP an drei Engstellen B1, B2 und B3Auf vielen Schnellstraßen gibt es sehr häufig mehrere nahe benachbart liegende Engstellen. Das dann auftretende Verkehrsmuster, das über zwei oder mehr Engstellen der Straße auftreten kann, wird EP genannt (EP: Expanded Pattern). Ein EP kann auch nur aus synchronisiertem Verkehr bestehen (ESP: Expanded Synchronized Flow Pattern), aber für gewöhnlich bilden sich im synchronisierten Verkehr sich bewegende breite Staus. Im letzteren Fall wird das EP als EGP (EGP: Expanded General Pattern) bezeichnet. Ein EGP besteht dann sowohl aus synchronisiertem Verkehr als auch aus sich bewegenden breiten Staus (Bild 9).
Anwendungen der Drei-Phasen-Theorie
 Bild 10: Verkehrsmuster EGP in der Anwendung ASDA/FOTO in drei Ländern
Bild 10: Verkehrsmuster EGP in der Anwendung ASDA/FOTO in drei LändernEine der in Software umgesetzten und vielfach eingesetzten Anwendungen der Kerner’schen Drei-Phasen-Verkehrstheorie sind die Modelle ASDA/FOTO (Automatische StauDynamikAnalyse und Forecasting Of Traffic Objects). ASDA/FOTO erzeugt in einem online-Verkehrssystem basierend auf Verkehrsmessungen die Phasen des gestauten Verkehrs, [S] und [J]. Zur Erkennung, Verfolgung und Prognose der jeweiligen Verkehrsphasen [S] und [J] werden dabei die Eigenschaften aus der Kerner’schen Theorie verwendet und in den Modellen ASDA/FOTO in einem Software-Werkzeug umgesetzt, das große Verkehrsdatenmengen auch in größeren Schnellstraßennetzen schnell und effizient verarbeiten kann (siehe Beispiele aus drei Ländern, Bild 10).
Weitere Anwendungsmöglichkeiten der Theorie sind neben der Entwicklung von Simulationsmodellen beispielsweise eine Zuflussregelung (ANCONA), kollektive Verkehrssteuerung, Fahrerassistenz und Verkehrszustandserkennung im Fahrzeug, die in den beiden Büchern von Kerner beschrieben werden.
Literatur
- Boris S. Kerner: Introduction to Modern Traffic Flow Theory and Control. The Long Road to Three-Phase Traffic Theory. 1 Auflage. Springer Verlag, Berlin 2009, ISBN 978-3-642-02604-1.
- Boris S. Kerner: The Physics of Traffic. Empirical Freeway Pattern Features, Engineering Applications, and Theory. In: Understanding Complex Systems. 1 Auflage. Springer Verlag, Berlin 2004, ISBN 3-540-20716-3.
Weblinks
- D. Helbing, "Criticism of three-phase traffic theory". Transportation Research Part B: Methodische 43 (7): 784-797. Doi: 10.1016/j.trb.2009.02.004.
- H. Rehborn, S. Klenov, "Traffic Prediction of Congested Patterns", In: R. Meyers (Ed.): Encyclopedia of Complexity and Systems Science, Springer New York, 2009.
- J. Palmer, H. Rehborn, "ASDA/FOTO auf Basis der Kerner'schen Drei-Phasen Verkehrstheorie in Nordrhein-Westfalen beim WDR". Straßenverkehrstechnik 08/2008, pp. 463-470.
- H. Rehborn, J. Palmer, "Using ASDA and FOTO to generate RDS/TMC traffic messages", Traffic Engineering and Control, July 2008, pp.261-266.
- L. C. Davis, Eine Buch-Besprechung des Buches von B.S. Kerner "Introduction to Modern Traffic Flow Theory and Control" in Physics Today , Vol. 63, Issue 3 (2010), p. 53
- H. Hartenstein, Eine Buch-Besprechung des Buches von B.S. Kerner "Introduction to Modern Traffic Flow Theory and Control" in IEEE Vehicular Technology Magazine, Vol. 5, Issue 3 (2010), p. 91
Einzelnachweise
- ↑ a b c Boris S. Kerner, "Experimental Features of Self-Organization in Traffic Flow", Physical Review Letters, 81, 3797-3400 (1998)
- ↑ a b c Boris S. Kerner, "The physics of traffic", Physics World Magazine 12, 25-30 (August 1999)
- ↑ a b c Boris S. Kerner, "Congested Traffic Flow: Observations and Theory", Transportation Research Record, Vol. 1678, pp. 160-167 (1999)












Wikimedia Foundation.