- Biot Savartsche Gesetz
-
Das Biot-Savart-Gesetz stellt einen Zusammenhang zwischen der magnetischen Feldstärke H und der Stromdichte J her und erlaubt die räumliche Berechnung magnetischer Feldstärkenverteilungen aufgrund der Kenntnis der räumlichen Stromverteilungen. Hier wird das Gesetz als Beziehung zwischen der magnetischen Flussdichte B und der elektrischen Stromdichte J behandelt.
Bemerkung: In speziellen Fällen, dies sind beispielsweise magnetisch lineare und isotrope Stoffe oder auch im „freien Fall“ (ohne Materie) besteht zwischen der magnetischen Flussdichte und der Feldstärke der Zusammenhang B = μ H mit einem konstanten Proportionalitätsfaktor μ der magnetischen Leitfähigkeit oder Permeabilität. Im allgemeinen Fall (z. B. Magnete) kann hingegen die magnetische Leitfähigkeit μ eine Funktion der magnetischen Feldstärke oder der räumlichen Orientierung sein, womit sich deutlich kompliziertere und unter Umständen analytisch nicht mehr darstellbare Zusammenhänge ergeben können.
Benannt wurde dieses Gesetz nach den beiden französischen Mathematikern Jean-Baptiste Biot und Félix Savart. Es stellt neben dem Ampèreschen Gesetz eines der Grundgesetze der Magnetostatik, eines Teilgebiets der Elektrodynamik, dar.
Inhaltsverzeichnis
Formulierung
Ein Stromleiter der infinitesimalen Länge dl am Ort r′, der von einem Strom I durchflossen wird, erzeugt am Ort r die magnetische Flussdichte B (unter Verwendung des Kreuzprodukts):
 .
.
Die gesamte magnetische Flussdichte ergibt sich durch Aufsummieren aller vorhandenen infinitesimalen Stücke, also durch Integrieren. Das entstehende Wegintegral kann man unter Benutzung von
in ein Volumenintegral umformen, wobei J die elektrische Stromdichte ist. Somit erhält man die integrale Form des Biot-Savartschen Gesetzes:
 .
.
Diese beiden Formeln ähneln (mit Strömen statt Ladungen) dem Coulombschen Gesetz, das die Gestalt des elektrischen Feldes in Abhängigkeit einer Ladungsverteilung beschreibt.
In den beiden obigen Formeln wurde dabei vernachlässigt, dass die Stromleiter einen endlichen Querschnitt haben. In realen Anwendungen ist dieser im Vergleich zur Ausdehnung des Magnetfeldes aber auch tatsächlich ohne Bedeutung. Eine weitere Ungenauigkeit besteht darin, dass sich der Beitrag einer Ladung an einem Ort zum Magnetfeld an einem anderen Ort mit Lichtgeschwindigkeit ausbreitet. Der entsprechende Retardierungseffekt wird im Biot-Savart- Gesetz nicht berücksichtigt. Es ist daher nur für stationäre Ströme streng gültig und für Punktladungen in guter Näherung, sofern ihre Geschwindigkeit klein im Vergleich zur Lichtgeschwindigkeit ist.
Ableitung aus den Maxwellgleichungen
Im folgenden werden Retardierungseffekte vernachlässigt und der zeitlich konstante Fall in Form der Magnetostatik betrachtet. Aus den Maxwellgleichungen folgt dann die Poissongleichung für das Vektorpotential:

mit der Lösung [1]:
Damit folgt für die magnetische Flußdichte:

Mit Hilfe der Formeln
 für die Anwendung des rot-Operators
für die Anwendung des rot-Operators  auf ein Produkt aus skalarer Funktion und Vektorfunktion und
auf ein Produkt aus skalarer Funktion und Vektorfunktion undfolgt das Endergebnis, wenn man berücksichtigt, dass
im Integral nur auf die Variable  und nicht auf
und nicht auf  wirkt. Häufig ist es vorteilhafter, das Vektorpotential zu berechnen und daraus die magnetische Flußdichte.
wirkt. Häufig ist es vorteilhafter, das Vektorpotential zu berechnen und daraus die magnetische Flußdichte.Anwendung
Kreisförmige Leiterschleife
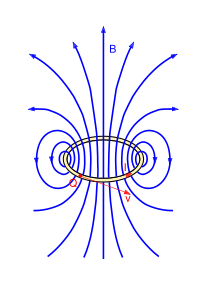 Magnetfeld in einer Stromschleife
Magnetfeld in einer StromschleifeDer Betrag der magnetischen Feldstärke einer kreisförmigen Leiterschleife kann mit Hilfe des Biot-Savart- Gesetzes auf der Symmetrieachse senkrecht zur Leiterschleife geschlossen, angegeben werden:
Dabei ist rQ der Radius der in der y-z-Ebene liegenden Leiterschleife, und x der Abstand des Beobachtungspunktes vom Zentrum der Leiterschleife. Das Feld ist in x-Richtung gerichtet.
Durch Substitution:
erhält man daraus
Im Fall kann das Feld der Leiterschleife als Dipolfeld behandelt werden: beispielsweise für Punkte auf der x-Achse zeigt es für große Abstände (große x) eine
kann das Feld der Leiterschleife als Dipolfeld behandelt werden: beispielsweise für Punkte auf der x-Achse zeigt es für große Abstände (große x) eine  - Abhängigkeit:
- Abhängigkeit:mit dem magnetischen (Dipol-) Moment
 (Strom x Fläche der Leiterschleife).
(Strom x Fläche der Leiterschleife).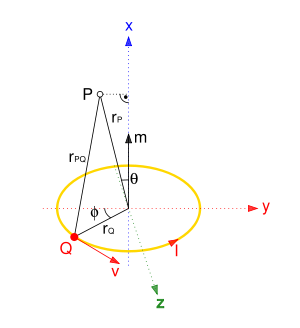 Abhängigkeiten zur Berechnung der Flußdichte B in einem Punkt P neben einer Stromschleife
Abhängigkeiten zur Berechnung der Flußdichte B in einem Punkt P neben einer Stromschleife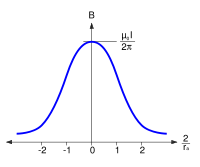 Flussdichte B in Abhängigkeit des Radius ra entlang der Achse der Leiterschleife
Flussdichte B in Abhängigkeit des Radius ra entlang der Achse der LeiterschleifeGerader Linienleiter
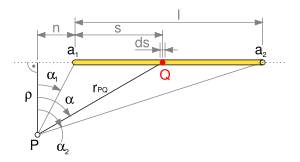 Abhängigkeiten zur Berechnung beim geraden Linienleiter
Abhängigkeiten zur Berechnung beim geraden LinienleiterZur Berechnung der Flußdichte B in einem Punkt P kann man die folgende Formel anwenden:
Umgelegt auf die Winkel erhält man
wobei verwendet wurde
 ist der Einheitsvektor senkrecht der Ebene, in der P und der Leiter liegen (Richtung nach den Regeln des Kreuzprodukts).
ist der Einheitsvektor senkrecht der Ebene, in der P und der Leiter liegen (Richtung nach den Regeln des Kreuzprodukts).Unendlich langer gerader Linienleiter
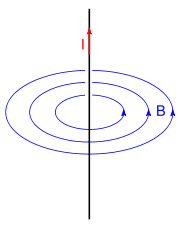 B-Feld eines geraden Leiters
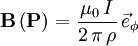
B-Feld eines geraden LeitersFür das Magnetfeld eines geraden, unendlich langen, Leiters längs der z-Achse ergibt das obige Linienintegral
 ,
,
wobei ρ der senkrechte Abstand zur z-Achse und
 der Einheitsvektor bezüglich des Winkels φ der zugehörigen Zylinderkoordinaten ist. Das Magnetfeld bildet damit konzentrische Kreise um den Leiter und nimmt umgekehrt proportional zum Abstand vom Leiter ab. In vektorieller Form erhält man:
der Einheitsvektor bezüglich des Winkels φ der zugehörigen Zylinderkoordinaten ist. Das Magnetfeld bildet damit konzentrische Kreise um den Leiter und nimmt umgekehrt proportional zum Abstand vom Leiter ab. In vektorieller Form erhält man:Rahmenspule
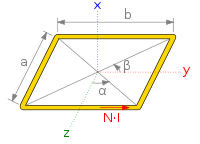 Abhängigkeiten zur Berechnung der Rahmenspule
Abhängigkeiten zur Berechnung der RahmenspuleNach der runden Spule ist die Rahmenspule (mit N Windungen) die am häufigsten verwendete Variante. Die Formel für das Magnetfeld im Zentrum kann aus der Formel für den Linienleiter abgeleitet werden, indem man die geraden Abschnitte der Spule als Linienleiter behandelt.
mit
Für das Magnetfeld auf der x-Achse, in großem Abstand von der Spule, ergibt sich:
Also wieder eine Abhängigkeit wie beim Dipol. Mit magnetischem Moment
 geschrieben:
geschrieben:Siehe auch
Literatur
- Karl Küpfmüller, Gerhard Kohn: Theoretische Elektrotechnik und Elektronik. 14 Auflage. Springer, Berlin 1993, ISBN 3-540-56500-0.
- Klaus Dransfeld, Paul Kienle Physik II – Elektrodynamik, Oldenbourg 1975
Anmerkungen
- ↑ siehe die Herleitung im Artikel Helmholtzgleichung, wobei hier im SI-System gerechnet wird und daher andere Vorfaktoren verwendet werden















Wikimedia Foundation.